Содержание страницы
- 1. Концепция квадрантов работы электропривода
- 2. Двухквадрантный преобразователь: схемотехника и принцип действия
- 3. Четырехквадрантный преобразователь (H-мост)
- 4. Сравнительная характеристика преобразователей
- 5. Преимущества и недостатки многоквадрантных систем
- 6. Практический пример расчета: Режим рекуперативного торможения
- 7. Интересные факты о многоквадрантных преобразователях
- 8. FAQ: Часто задаваемые вопросы
- Заключение
В современной силовой электронике преобразователи электрической энергии играют ключевую роль в управлении потоками мощности. Если простейшие импульсные регуляторы (чопперы) способны передавать энергию только в одном направлении (от источника к нагрузке), то более сложные системы требуют гибкости — способности не только ускорять исполнительные механизмы, но и тормозить их, возвращая энергию обратно в сеть.
Многоквадрантный преобразователь постоянного тока — это электронное устройство, способное формировать на выходе напряжение и ток различной полярности, обеспечивая работу электрической машины во всех четырех квадрантах механической характеристики (двигательный режим и режим генераторного торможения в обоих направлениях вращения).
В данном материале мы подробно разберем принципы работы двух- и четырехквадрантных преобразователей, их математическое описание и схемотехнические особенности.
1. Концепция квадрантов работы электропривода
Для понимания работы преобразователей необходимо обратиться к декартовой системе координат, где по оси абсцисс откладывается момент (или ток якоря \( I_{out} \)), а по оси ординат — угловая скорость (или напряжение на якоре \( U_{out} \)).
- I квадрант: \( U > 0, I > 0 \). Энергия идет от источника к двигателю. Вращение «вперед», тяга.
- II квадрант: \( U > 0, I < 0 \). Энергия возвращается в источник. Вращение «вперед», торможение.
- III квадрант: \( U < 0, I < 0 \). Энергия идет от источника к двигателю. Вращение «назад», тяга.
- IV квадрант: \( U < 0, I > 0 \). Энергия возвращается в источник. Вращение «назад», торможение.
Аналогия: Представьте, что вы управляете автомобилем.
1. Вы давите на газ на ровной дороге — машина ускоряется вперед (I квадрант, потребление энергии).
2. Вы едете с горы и отпускаете газ, двигатель начинает тормозить машину — энергия возвращается (II квадрант, рекуперация).
3. Вы включили заднюю передачу и газуете — едете назад (III квадрант).
4. Вы едете назад, но нажимаете тормоз — машина замедляется (IV квадрант).
Многоквадрантный преобразователь — это «коробка передач» для электричества, позволяющая реализовать все эти режимы.
2. Двухквадрантный преобразователь: схемотехника и принцип действия
Двухквадрантные преобразователи (часто называемые полумостовыми схемами в контексте DC-привода) позволяют управлять двигателем в режимах тяги и рекуперативного торможения, но, как правило, без смены направления вращения (без реверса напряжения, но с реверсом тока).
2.1. Описание схемы
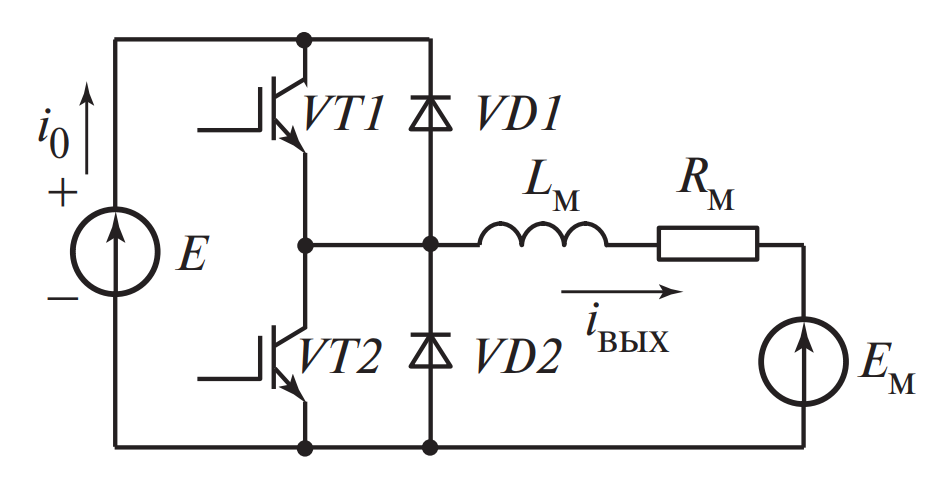
Рассмотрим принципиальную схему, представленную на Рисунке 1. Она состоит из источника питания \( E \), двух активных транзисторных ключей \( VT1 \) и \( VT2 \), двух обратных диодов \( VD1 \) и \( VD2 \), а также нагрузки — машины постоянного тока.
Схема замещения машины постоянного тока включает:
- \( R_m \) — активное сопротивление обмотки якоря;
- \( L_m \) — индуктивность обмотки якоря (играет роль фильтра и накопителя энергии);
- \( E_m \) — противоэлектродвижущая сила (ПротивоЭДС) вращения, пропорциональная скорости.
2.2. Режим двигательный (I квадрант)
При работе электрической машины в двигательном режиме основную роль играет транзистор \( VT1 \). Транзистор \( VT2 \) в этом режиме постоянно заперт. Процесс регулирования напряжения происходит методом широтно-импульсной модуляции (ШИМ).
Этап 1: Замыкание ключа. При подаче отпирающего сигнала на \( VT1 \), ток от источника \( E \) протекает через обмотку якоря двигателя. Уравнение электрического равновесия описывается дифференциальным уравнением:
В этот момент происходит накопление энергии в магнитном поле индуктивности \( L_m \), ток нарастает по экспоненциальному закону.
Этап 2: Размыкание ключа. Когда \( VT1 \) запирается, ток в индуктивности \( L_m \) не может мгновенно измениться до нуля из-за закона коммутации. Возникает ЭДС самоиндукции, которая стремится поддержать протекание тока. Ток замыкается через обратный диод \( VD2 \) (который часто называют «нулевым» или «freewheeling diode»). Напряжение на выходе преобразователя становится близким к нулю (падение напряжения на диоде), а к двигателю прикладывается накопленная энергия индуктивности.
2.3. Режим рекуперативного торможения (II квадрант)
Для перехода в режим торможения необходимо изменить направление потока энергии. В этом случае \( E_m > U_{out} \). Для реализации этого режима используется нижний ключ \( VT2 \).
Когда \( VT2 \) открывается, ток якоря нарастает под действием ЭДС двигателя \( E_m \) (машина работает как генератор), замыкаясь через \( VT2 \). Индуктивность \( L_m \) накапливает энергию.
При размыкании \( VT2 \) ток, поддерживаемый индуктивностью, вынужден течь через диод \( VD1 \) в источник питания \( E \). Таким образом происходит возврат (рекуперация) энергии в сеть.
3. Четырехквадрантный преобразователь (H-мост)
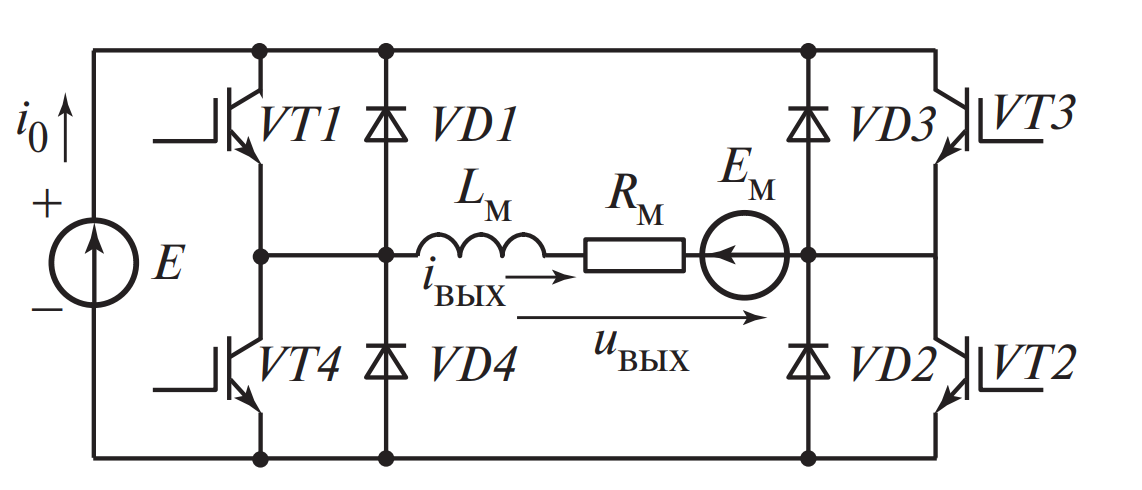
Чтобы обеспечить полноценное управление двигателем с возможностью реверса (вращение в обе стороны) и торможения в обоих направлениях, применяют мостовую схему (H-Bridge), показанную на Рисунке 2.
3.1. Схемотехника мостовой схемы
Схема содержит четыре силовых ключа (\( VT1, VT2, VT3, VT4 \)), каждый из которых шунтирован встречно-параллельным диодом (\( VD1, VD2, VD3, VD4 \)). Нагрузка (двигатель) включена в диагональ моста.
3.2. Алгоритмы управления (Модуляция)
Существует два основных способа управления ключами в мостовой схеме: биполярная и униполярная коммутация.
3.2.1. Диагональное управление (Биполярная ШИМ)
Ключи переключаются парами по диагонали:
- Включаются \( VT1 \) и \( VT4 \): к нагрузке прикладывается напряжение \( +E \). Ток течет слева направо.
- Включаются \( VT2 \) и \( VT3 \): к нагрузке прикладывается напряжение \( -E \). Ток течет справа налево.
Среднее напряжение на выходе определяется скважностью импульсов \( \gamma \) (отношение времени включенного состояния к периоду):
Где \( \gamma \) меняется от 0 до 1. При \( \gamma = 0.5 \) среднее напряжение равно нулю (двигатель стоит).
3.2.2. Особенности формирования мертвого времени (Dead Time)
3.3. Анализ путей протекания тока
Рассмотрим ситуацию, когда двигатель вращается вперед, и мы хотим затормозить его (переход из I во II квадрант):
- Работала пара \( VT1-VT4 \).
- Мы выключаем все транзисторы. Ток в индуктивности \( L_m \) не может исчезнуть.
- Ток продолжает течь в том же направлении, открывая диоды \( VD2 \) и \( VD3 \).
- Через эти диоды энергия противоЭДС и индуктивности сбрасывается обратно в источник \( E \).
Таким образом, диоды \( VD1-VD4 \) автоматически обеспечивают пути для реактивного тока и тока рекуперации, защищая транзисторы от перенапряжения.
4. Сравнительная характеристика преобразователей
Для наглядности сведем параметры рассмотренных топологий в таблицу. Это поможет инженеру или студенту выбрать правильную схему под конкретную задачу.
| Параметр | Одноквадрантный (Чоппер) | Двухквадрантный | Четырехквадрантный (H-мост) |
|---|---|---|---|
| Количество ключей | 1 (VT) + 1 (VD) | 2 (VT) + 2 (VD) | 4 (VT) + 4 (VD) |
| Направление вращения | Только одно | Только одно | Вперед и назад |
| Режим торможения | Динамическое (на резистор) или выбег | Рекуперативное (возврат в сеть) | Рекуперативное в обе стороны |
| Сложность управления | Низкая | Средняя | Высокая (требуется контроль Dead Time) |
| Стоимость реализации | Низкая | Средняя | Высокая |
5. Преимущества и недостатки многоквадрантных систем
Преимущества:
- Энергоэффективность: Возможность возврата энергии торможения в сеть существенно (до 30-40% в цикличных режимах) снижает общее энергопотребление системы.
- Быстродействие: Высокая динамика управления током позволяет реализовать прецизионные сервоприводы.
- Управляемость: Полный контроль над моментом во всех режимах движения.
Недостатки:
- Сложность схемы: Требуется больше силовых компонентов и драйверов управления затворами.
- Помехи: Жесткая коммутация токов (Hard Switching) создает высокий уровень электромагнитных помех (EMI), что требует установки входных и выходных фильтров.
- Требования к источнику: Источник должен уметь «принимать» ток, иначе требуются тормозные прерыватели (Brake Choppers).
6. Практический пример расчета: Режим рекуперативного торможения
Для закрепления теоретического материала проведем расчет параметров управления четырехквадрантным преобразователем (H-мостом) для конкретной инженерной задачи. Этот пример поможет понять, как абстрактные формулы применяются при проектировании реального электропривода, например, для легкого электротранспорта (электросамокат или робот-курьер).
6.1. Постановка задачи
Имеется электропривод на базе двигателя постоянного тока с независимым возбуждением (или с постоянными магнитами). Система находится в движении, и необходимо осуществить рекуперативное торможение с заданным током (моментом), чтобы вернуть энергию в аккумуляторную батарею.
Исходные данные:
- Напряжение питания (аккумулятор) \( U_{DC} = 48 \, \text{В} \).
- Сопротивление якоря двигателя \( R_m = 0.5 \, \text{Ом} \).
- Индуктивность якоря \( L_m = 2 \, \text{мГн} \) (\( 0.002 \, \text{Гн} \)).
- Текущая ЭДС вращения двигателя (пропорциональна скорости) \( E_m = 40 \, \text{В} \).
- Требуемый ток рекуперации (тормозной ток) \( I_{req} = -10 \, \text{А} \) (знак «минус» указывает, что ток течет против напряжения источника).
- Частота ШИМ \( f_{sw} = 10 \, \text{кГц} \).
6.2. Расчет коэффициента заполнения (Duty Cycle)
Нам необходимо найти скважность (коэффициент заполнения) \( \gamma \), которую должен задать микроконтроллер на ключи преобразователя, чтобы поддерживать ток \( -10 \, \text{А} \).
Используем уравнение электрического равновесия по второму закону Кирхгофа для усредненных значений. Напряжение на зажимах двигателя \( U_{avg} \) уравновешивается падением напряжения на сопротивлении и ПротивоЭДС:
Подставим известные значения, чтобы найти требуемое напряжение на клеммах:
\( U_{avg} = 40 \, \text{В} + (-10 \, \text{А}) \cdot 0.5 \, \text{Ом} \)
\( U_{avg} = 40 — 5 = 35 \, \text{В} \)
Это означает, что преобразователь должен создавать «встречное» напряжение 35 В. Так как 35 В < 40 В, ток действительно потечет от двигателя в преобразователь.
Теперь свяжем это напряжение с управлением. Для биполярной модуляции (когда ключи переключаются диагонально) передаточная характеристика H-моста выглядит следующим образом:
Выразим отсюда искомый коэффициент заполнения \( \gamma \):
\( \frac{U_{avg}}{U_{DC}} = 2\gamma — 1 \)
\( 2\gamma = \frac{U_{avg}}{U_{DC}} + 1 \)
\( \gamma = 0.5 \cdot \left( \frac{35}{48} + 1 \right) \)
Проводим вычисление:
Результат: Для обеспечения тормозного тока 10 А система управления должна установить скважность импульсов \( \approx 86.5\% \). Это соответствует работе в IV квадранте (положительное напряжение, отрицательный ток).
6.3. Проверка пульсаций тока
Для качественной работы привода важно оценить амплитуду пульсаций тока \( \Delta I \). Если пульсации слишком велики, это приведет к перегреву двигателя и повышенным потерям в железе.
Максимальные пульсации в мостовой схеме достигаются при \( \gamma = 0.5 \) (нулевое выходное напряжение), однако рассчитаем их для нашей точки \( \gamma = 0.865 \). Формула пульсаций на периоде ШИМ:
Воспользуемся упрощенной оценкой для H-моста с биполярной коммутацией:
Подставим значения:
\( \Delta I \approx \frac{48}{0.002 \cdot 10000} \cdot 2 \cdot 0.8645 \cdot (1 — 0.8645) \)
\( \Delta I \approx 2.4 \cdot 1.729 \cdot 0.1355 \approx 0.56 \, \text{А} \)
Вывод: Пульсация составляет \( 0.56 \, \text{А} \), что при среднем токе 10 А составляет около 5.6%. Это отличный показатель, говорящий о том, что индуктивность \( L_m \) подобрана правильно, и дополнительный сглаживающий дроссель не требуется.
7. Интересные факты о многоквадрантных преобразователях
- Эффект «Метро». В старых поездах метрополитена торможение осуществлялось реостатами, превращающими кинетическую энергию в тепло, что сильно нагревало туннели. Внедрение многоквадрантных преобразователей позволило возвращать энергию в контактную сеть, снизив температуру в подземке на 3–5°C и сэкономив до 20% электричества.
- Музыкальный «Чоппер». Современные аудиоусилители класса D по своей сути являются высокочастотными четырехквадрантными преобразователями. Они модулируют сигнал звуковой частоты с помощью ШИМ, управляя динамиком так же, как промышленный привод управляет двигателем, обеспечивая КПД выше 90% по сравнению с 50% у аналоговых усилителей класса АВ.
- Мертвая зона. Самый страшный враг H-моста — это «сквозной ток», когда верхний и нижний транзисторы одной стойки открываются одновременно, вызывая короткое замыкание. Чтобы этого избежать, инженеры вводят «Dead Time» (мертвое время) длительностью от 100 наносекунд до нескольких микросекунд, когда все ключи гарантированно закрыты.
- Автомобиль-донор. Технология V2G (Vehicle-to-Grid) превращает электромобиль в мобильную электростанцию. Благодаря двунаправленному инвертору, машина может не только заряжаться, но и отдавать энергию обратно в домашнюю сеть в часы пик, зарабатывая деньги владельцу.
- Бесконечные тормоза. В карьерных самосвалах с электроприводом механические тормоза используются только для полной остановки на скорости ниже 5 км/ч. Всю основную работу по гашению огромной инерции 400-тонной машины выполняют преобразователи в генераторном режиме, сжигая энергию на тормозных резисторах размером с комнату.
- Четвертый квадрант лифта. Самый наглядный пример работы в IV квадранте — это опускание груженой кабины лифта. Двигатель вращается «назад» (вниз), но момент направлен «вверх» (чтобы кабина не упала). Электропривод в этот момент работает как генератор, удерживая груз магнитным полем.
- Кремниевая революция. До появления мощных IGBT-транзисторов в 1980-х годах, создание компактных 4-квадрантных приводов было невозможно. Использовались громоздкие тиристорные схемы с принудительной коммутацией, которые занимали целые шкафы и гудели как трансформаторные будки.
8. FAQ: Часто задаваемые вопросы
1. Почему нельзя просто поменять полярность источника питания для реверса двигателя?
Теоретически можно, используя электромеханическое реле (контактор). Но реле имеет ограниченный ресурс переключений, искрит и работает медленно. Четырехквадрантный преобразователь на транзисторах позволяет менять полярность тысячи раз в секунду, плавно регулировать скорость и момент, что невозможно при простой переполюсовке источника.
2. Что произойдет, если источник питания не может принимать энергию рекуперации?
Если вы используете обычный диодный блок питания и начнете тормозить двигателем, энергия рекуперации зарядит выходные конденсаторы источника. Напряжение на шине DC начнет неконтролируемо расти (fenomen «pumping»), что приведет к пробою конденсаторов или ключей. В таких случаях необходимо ставить «тормозной прерыватель» (Brake Chopper) — транзистор с мощным резистором, который сожжет излишки энергии.
3. В чем разница между режимами Slow Decay и Fast Decay при торможении?
Это режимы спада тока. В режиме Slow Decay (медленный спад) обмотки двигателя замыкаются накоротко через нижние ключи моста — ток циркулирует внутри и затухает медленно (мягкое торможение). В режиме Fast Decay (быстрый спад) ток принудительно направляется в источник против его напряжения — ток падает быстро, обеспечивая резкое торможение и возврат энергии.
4. Можно ли сделать 4-квадрантный преобразователь только на двух транзисторах?
Нет, классический H-мост требует 4 ключа. Схема на двух транзисторах (полумост) является двухквадрантной. Она может ускорять и тормозить двигатель, но только при одном направлении вращения. Для полноценного реверса напряжения и тока необходима полная мостовая схема. Исключение — двухполярное питание со средней точкой, но это редкость в силовых приводах.
5. Как выбрать частоту ШИМ для такого преобразователя?
Частота выбирается как компромисс. Слишком низкая частота (менее 1-2 кГц) вызовет слышимый писк и большие пульсации тока, перегревающие двигатель. Слишком высокая частота (более 20-30 кГц) приведет к перегреву транзисторов из-за динамических потерь при переключении. Оптимальный диапазон для двигателей средней мощности — от 8 до 16 кГц (выше порога слышимости человека, но доступно для IGBT).
Заключение
Многоквадрантные преобразователи постоянного тока представляют собой фундамент современной приводной техники. Переход от простейших регуляторов к двух- и четырехквадрантным схемам позволил создавать высокоэффективные транспортные системы (электромобили, трамваи, поезда метро), робототехнические комплексы и прецизионные станки.
Несмотря на вытеснение коллекторных двигателей машинами переменного тока, принципы построения мостовых инверторов остаются едиными, делая изученный материал универсальной базой для силовой электроники.
Нормативная база
- ГОСТ IEC 61800-1-2023 — Системы силовых электроприводов с регулируемой скоростью. Часть 1. Общие требования.
- ГОСТ IEC 61800-2-2023 — Общие требования. Номинальные параметры низковольтных систем силовых электроприводов переменного тока с регулируемой частотой.
- ГОСТ Р 54130-2010 — Качество электрической энергии. Термины и определения
- ГОСТ 30804.6.4-2013 (IEC 61000-6-4:2006) — Совместимость технических средств электромагнитная. Электромагнитная эмиссия.
Список литературы
- Розанов, Ю. К. Силовая электроника: учебник для вузов / Ю. К. Розанов, М. В. Рябчицкий, А. А. Кваснюк. — 2-е изд., стереотип. — Москва: Издательский дом МЭИ, 2018. — 632 с.
- Зиновьев, Г. С. Основы силовой электроники: Учебник / Г. С. Зиновьев. — 5-е изд., испр. и доп. — Новосибирск: Изд-во НГТУ, 2014. — 672 с.
- Герман-Галкин, С. Г. Компьютерное моделирование полупроводниковых систем в MATLAB 6.0: Учебное пособие / С. Г. Герман-Галкин. — СПб.: КОРОНА принт, 2007. — 320 с.
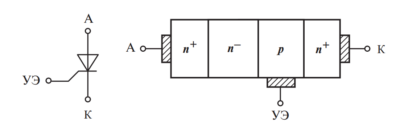
Тиристор - это электронный аналог управляемого обратного клапана или механической защелки. Это полупроводниковый прибор, который может находиться Читать далее...
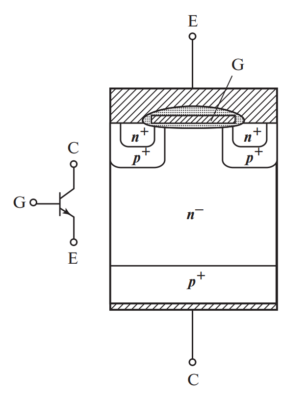
Что такое IGBT? Если отвечать кратко, то это «рабочая лошадка» современной силовой электроники. Аббревиатура расшифровывается как Insulated-Gate Bipolar Читать далее...
Двухтактные преобразователи (Push-Pull converters) — это класс импульсных источников питания, в которых энергия передается от первичного источника в Читать далее...

Управление силовыми полупроводниковыми ключами — это комплекс аппаратных решений, направленных на согласование низковольтной управляющей логики (микроконтроллеров, ПЛИС) Читать далее...