Содержание страницы
- 1. Архитектура и принцип действия силовой части
- 2. Математическая модель режима непрерывного тока (CCM)
- 3. Внешние характеристики и устойчивость
- 4. Режим прерывистого тока (DCM): Особенности и опасности
- 5. Расчет пульсаций выходного напряжения
- 6. Практические аспекты реализации и выбор компонентов
- 7. Практический пример: расчет силовой части понижающего преобразователя
- 8. Сравнительный анализ и итоговая таблица
- 9. Интересные факты о понижающих регуляторах
- 8. Часто задаваемые вопросы (FAQ)
- Заключение
Понижающий преобразователь постоянного напряжения (в англоязычной литературе — Buck Converter или Step-down Chopper) — это устройство, являющееся регулятором напряжения 1-го рода, преобразует входное постоянное напряжение высокого уровня в выходное стабилизированное напряжение более низкого уровня с высоким КПД.
1. Архитектура и принцип действия силовой части
Понижающий импульсный регулятор (ИР) представляет собой классическую схему силовой электроники, где регулирующий элемент (транзистор) работает в дискретном режиме: он либо полностью открыт (насыщение), либо полностью закрыт (отсечка). Это отличает его от линейных регуляторов и обеспечивает минимальные потери мощности.
В базовой топологии, рассматриваемой в данной работе, силовой транзистор включается последовательно между источником первичного питания \( E \) и сглаживающим фильтром с нагрузкой. Рассмотрим схемотехнику подробнее.
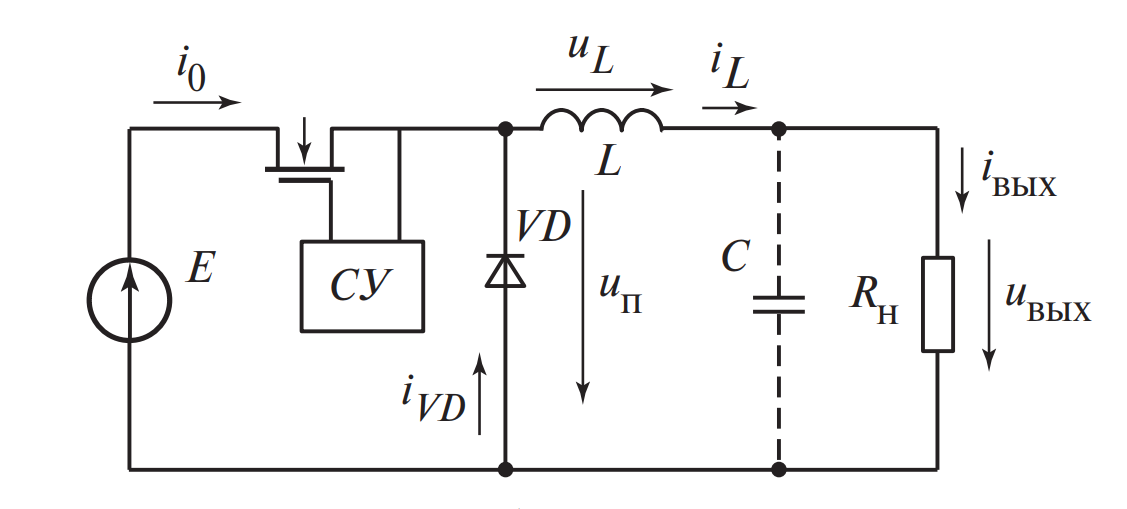
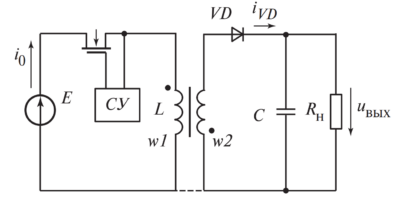
1.1. Детальный разбор схемотехники (по Рис. 1)
Схема, представленная на рисунке 1, состоит из следующих критических компонентов, взаимодействие которых определяет эффективность преобразования:
- Ключевой элемент (Транзистор VT): Обычно это MOSFET (МДП-транзистор) или IGBT. Он действует как высокочастотный рубильник, прерывающий поток энергии от источника \( E \).
- Обратный диод (VD): Называемый также «свободным» диодом (freewheeling diode). Он обеспечивает путь для протекания тока дросселя, когда транзистор закрыт, предотвращая возникновение опасных перенапряжений.
- Реактор (Дроссель L): Главный накопитель энергии. Индуктивность сопротивляется изменению тока, сглаживая импульсы от ключа и превращая их в непрерывный поток энергии в нагрузку.
- Конденсатор (C): Емкостной фильтр, который шунтирует высокочастотные пульсации напряжения, обеспечивая чистое постоянное питание для нагрузки \( R_н \).
2. Математическая модель режима непрерывного тока (CCM)
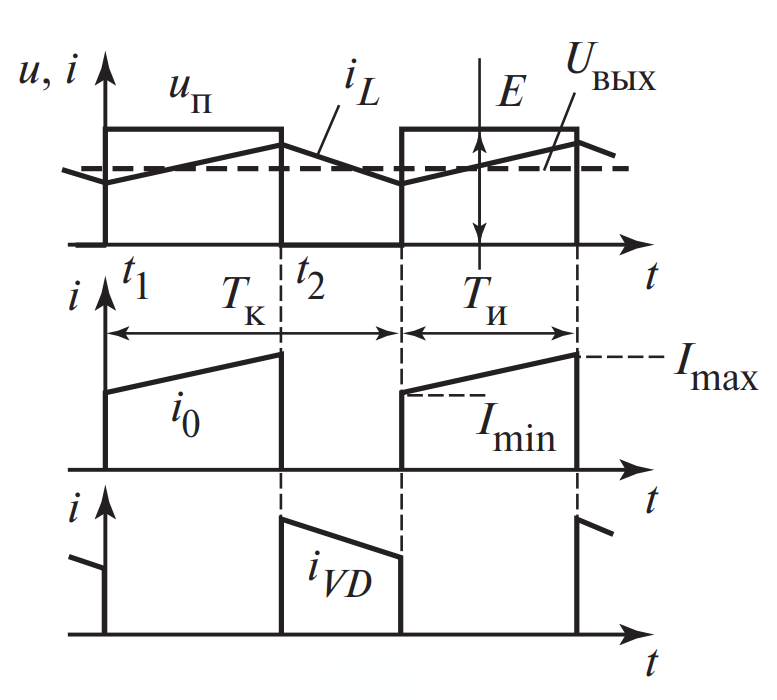
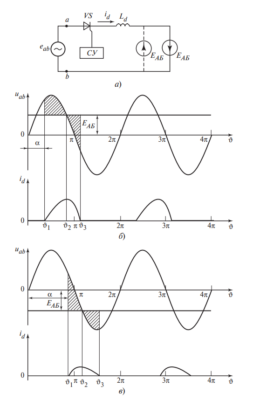
Режим непрерывного тока (Continuous Conduction Mode — CCM) является основным для большинства мощных преобразователей. Он характеризуется тем, что ток через дроссель \( L \) никогда не падает до нуля в течение всего периода коммутации \( T_k \). Визуализация этих процессов представлена на рисунке 2.
2.1. Интервал накопления энергии (\( t_1 — t_2 \))
В момент времени \( t_1 \) (см. диаграмму \( u_п \) на рис. 2) система управления подает сигнал на затвор транзистора, замыкая ключ. Длительность этого состояния обозначается как \( T_и \) (время импульса).
В этот промежуток времени:
- Источник питания \( E \) напрямую подключается к входу LC-фильтра.
- Диод \( VD \) смещен в обратном направлении (к катоду приложен «плюс» источника \( E \)) и ток не проводит.
- Напряжение на выходе ключа (в точке перед дросселем) равно \( u_п = E \).
К реактору \( L \) прикладывается разность потенциалов между входом и выходом. Учитывая, что выходное напряжение \( u_{out} \) (или \( u_{вых} \)) поддерживается конденсатором относительно стабильным:
Согласно закону электромагнитной индукции, положительное напряжение на индуктивности вызывает линейное нарастание тока \( i_L \) (см. график \( i_L \) на рис. 2). Ток \( i_0 \), потребляемый от источника, равен току дросселя \( i_L \). Энергия магнитного поля в сердечнике дросселя накапливается по закону \( W = \frac{L \cdot i^2}{2} \).
2.2. Интервал отдачи энергии (\( t_2 — t_1+T_k \))
В момент \( t_2 \) транзистор размыкается. Ток через транзистор \( i_0 \) мгновенно исчезает. Однако ток в индуктивности \( i_L \) не может измениться скачкообразно.
- Возникает ЭДС самоиндукции, которая пытается поддержать протекание тока. Полярность напряжения на дросселе меняется на противоположную: \( u_L = -u_{вых} < 0 \).
- Этот потенциал открывает диод \( VD \). Ток дросселя замыкается через диод, нагрузку и землю.
- Энергия, запасенная в магнитном поле дросселя, передается в нагрузку \( R_н \) и конденсатор \( C \).
На рисунке 2 видно, как на этом этапе ток дросселя линейно спадает, но не достигает нуля. Входной ток \( i_0 = 0 \), так как источник отключен.
2.3. Основное уравнение преобразования
Для стационарного режима работы справедливо правило вольт-секундного баланса на индуктивности: среднее напряжение на индуктивности за период должно быть равно нулю. Иначе ток бы бесконечно нарастал или падал.
Решая это уравнение относительно \( U_{вых} \), получаем фундаментальную формулу понижающего регулятора (см. формулу 5.6 в исходных данных):
Где \( \gamma \) (гамма) — коэффициент заполнения (Duty Cycle), лежащий в диапазоне \( 0 < \gamma < 1 \). Это доказывает, что выходное напряжение всегда ниже входного и регулируется шириной импульса.
2.4. Токовые соотношения и пульсации
Среднее значение тока дросселя \( I_{L ср} \) равно току нагрузки (так как средний ток конденсатора в установившемся режиме равен нулю):
Размах пульсаций тока \( \Delta I_L \) (разница между максимумом и минимумом на рис. 2) определяется индуктивностью и временем включенного состояния:
Где \( f_k \) — частота коммутации. Из формулы (5.8) видно, что для снижения пульсаций тока необходимо либо увеличивать индуктивность \( L \), либо повышать частоту \( f_k \).
3. Внешние характеристики и устойчивость
Поведение регулятора при изменении нагрузки описывается внешними характеристиками, представленными на рисунке 3. Они показывают зависимость выходного напряжения от тока нагрузки при фиксированном коэффициенте заполнения \( \gamma \).
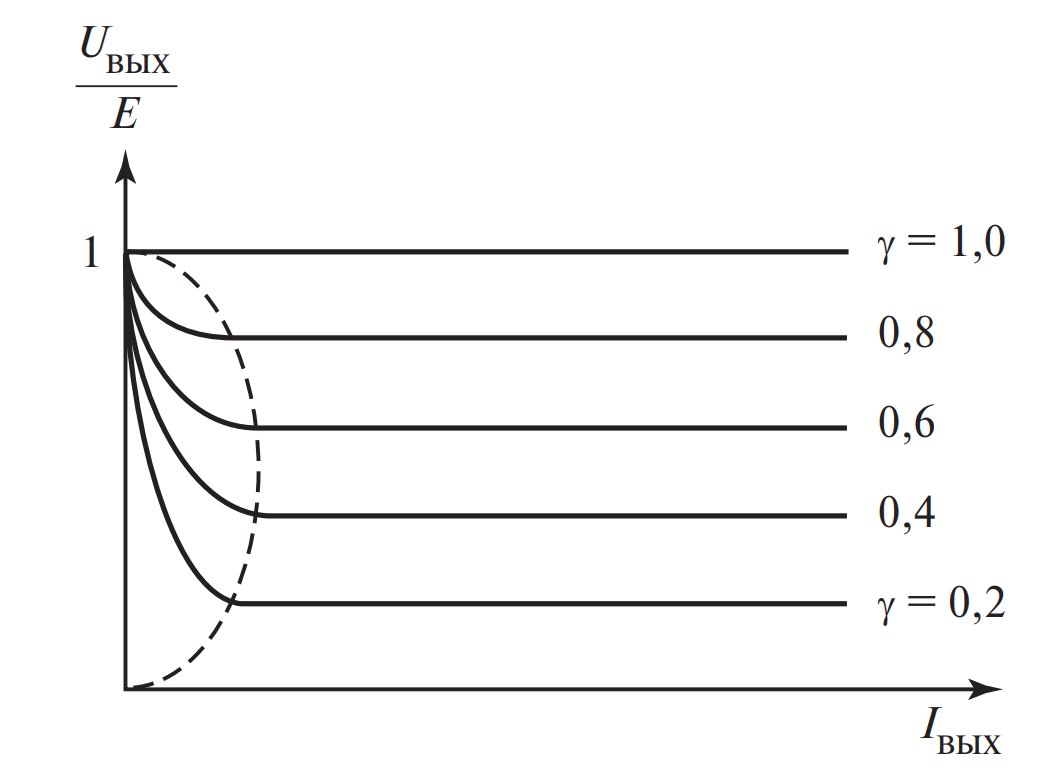
На рисунке 3 можно выделить две зоны:
- Правая часть (Основной режим): Характеризуется «жесткой» характеристикой. Линии идут почти горизонтально, наклон определяется лишь омическими потерями в преобразователе. Здесь действует формула \( U_{вых} = \gamma E \).
- Левая часть (Режим прерывистого тока): Штриховая парабола на рисунке 3 показывает границу критического тока. Слева от неё характеристики резко загибаются вверх. Это значит, что при уменьшении тока нагрузки напряжение начинает неконтролируемо расти, если не работает обратная связь.
4. Режим прерывистого тока (DCM): Особенности и опасности
При снижении тока нагрузки (увеличении \( R_н \)) или уменьшении индуктивности может наступить режим прерывистых токов (Discontinuous Conduction Mode — DCM), также называемый РПТ.
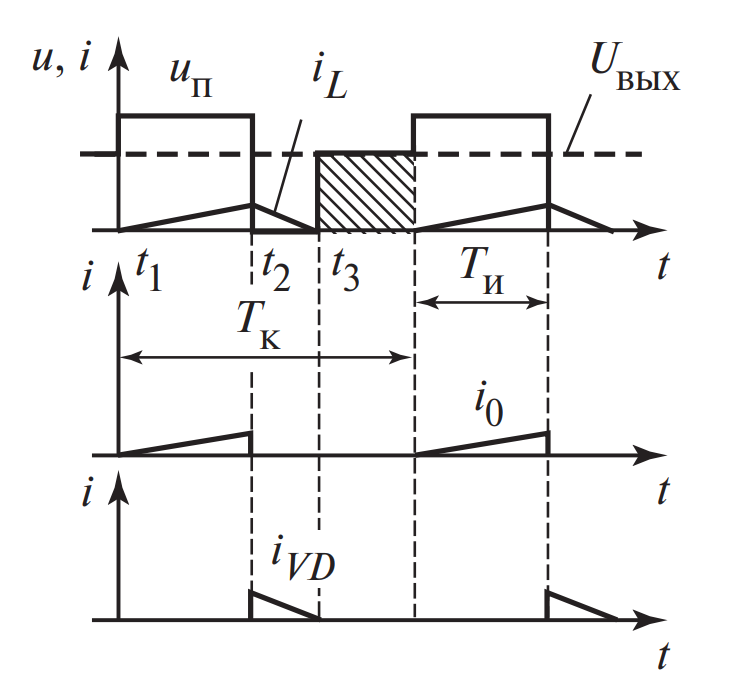
4.1. Физика процесса (по Рис. 4)
В этом режиме энергия, запасенная в дросселе за время импульса \( T_и \), полностью расходуется в нагрузку до окончания периода коммутации.
Процесс делится на три интервала:
- \( t_1 — t_2 \): Ключ замкнут, ток растет (как в CCM).
- \( t_2 — t_3 \): Ключ разомкнут, диод открыт, ток падает до нуля.
- \( t_3 — (t_1 + T_k) \): Ток дросселя равен нулю (см. график \( i_L \) на рис. 4). И диод, и транзистор закрыты. Нагрузка питается только энергией конденсатора \( C \).
На диаграмме напряжения \( u_п \) (рис. 4) виден участок, где \( i_L = 0 \). В этот момент напряжение на узле коммутации становится равным \( u_{вых} \) (так как ток не течет, падения напряжения на L нет). Заштрихованная область на графике 4 показывает это изменение напряжения, которое приводит к повышению среднего выходного напряжения.
4.2. Граничное условие
Переход из CCM в DCM происходит, когда пульсация тока \( \Delta I_L \) становится в два раза больше среднего тока нагрузки. Граничный ток нагрузки определяется как:
Как видно из рисунка 3, в режиме РПТ внешняя характеристика становится мягкой и крутопадающей. Это означает, что выходное напряжение начинает сильно зависеть от тока нагрузки, что усложняет задачу стабилизации. Система управления должна учитывать этот нелинейный скачок коэффициента передачи при разработке цепей обратной связи.
5. Расчет пульсаций выходного напряжения
Качество выходного напряжения определяется величиной его пульсаций. В режиме непрерывного тока пульсации напряжения \( \Delta U_{вых} \) на конденсаторе \( C \) определяются зарядом, который втекает и вытекает из конденсатора (площадь треугольника тока над средним значением):
Подставляя значение \( \Delta I_L \), получаем классическое выражение (аналог 5.10):
Эта формула демонстрирует квадратичную зависимость пульсаций от частоты. Повышение частоты с 20 кГц до 100 кГц позволяет уменьшить емкость конденсатора в 25 раз при сохранении тех же пульсаций.
6. Практические аспекты реализации и выбор компонентов
6.1. Выбор силовых ключей
Выбор типа транзистора зависит от рабочего напряжения и частоты:
- МДП-транзисторы (MOSFET): Идеальны для напряжений до 350–500 В. Их главное преимущество — высокое быстродействие, позволяющее работать на частотах 100 кГц — 1 МГц и выше. Это минимизирует габариты L и C. Однако при малых значениях \( \gamma \) (большая разница между входом и выходом) пиковый ток транзистора в \( 1/\gamma \) раз превышает средний, что требует запаса по току.
- IGBT-транзисторы: Используются при высоких напряжениях (>500-1000 В) и больших токах. Их рабочая частота обычно ограничена 20–40 кГц из-за «хвоста» тока при выключении, но они имеют меньшие потери проводимости при больших токах.
6.2. Входной фильтр и влияние на сеть
Серьезным недостатком понижающего регулятора является разрывной характер входного тока \( i_0 \) (прямоугольные импульсы, видимые на рис. 2). Это создает мощные электромагнитные помехи (EMI) и нагружает первичный источник питания.
7. Практический пример: расчет силовой части понижающего преобразователя
Проведем полный расчет силовой части понижающего преобразователя для типовой задачи питания микроконтроллерного устройства от бортовой сети автомобиля.
7.1. Техническое задание (ТЗ)
Предположим, нам необходимо спроектировать источник питания со следующими параметрами:
- Входное напряжение (\( E \)): 12 В (номинальное напряжение автомобильного аккумулятора).
- Выходное напряжение (\( U_{вых} \)): 5 В (питание цифровой логики).
- Максимальный ток нагрузки (\( I_{н.max} \)): 2 А.
- Частота коммутации (\( f_k \)): 100 кГц (типовое значение для распространенных контроллеров).
- Допустимая пульсация выходного напряжения (\( \Delta U_{вых} \)): 50 мВ (1% от выхода).
7.2. Шаг 1: Определение коэффициента заполнения (\( \gamma \))
Первым делом определим статический режим работы ключа. Пренебрегая падением напряжения на диоде и транзисторе (для первого приближения), рассчитываем коэффициент заполнения:
Это означает, что транзистор должен быть открыт 41.7% времени от всего периода.
7.3. Шаг 2: Выбор индуктивности дросселя (\( L \))
Это самый ответственный этап. Инженер должен задать величину пульсаций тока дросселя \( \Delta I_L \).
Золотое правило проектирования: оптимальной считается пульсация тока в пределах 20%…40% от максимального тока нагрузки. Если пульсация будет слишком маленькой — потребуется огромный и дорогой дроссель. Если слишком большой — вырастут потери в сердечнике и на конденсаторах.
Выберем пульсацию 30% от \( I_{н.max} \):
Теперь выразим индуктивность из формулы (5.8) для режима непрерывного тока:
Подставим значения:
7.4. Шаг 3: Расчет выходного конденсатора (\( C \))
Емкость рассчитывается исходя из требования к пульсациям напряжения \( \Delta U_{вых} = 50 \text{ мкВ} \). Используем формулу для идеального конденсатора:
Проверим требование к ESR конденсатора. Напряжение скачка на ESR определяется законом Ома: \( \Delta U_{ESR} = \Delta I_L \cdot ESR \). Чтобы уложиться в 50 мВ:
Вывод по конденсатору: Нам нужен конденсатор емкостью не менее 15 мкФ (лучше взять с запасом — 100 мкФ или 220 мкФ электролит, или керамику 22 мкФ) и, что самое важное, с ESR меньше 80 мОм. Обычный дешевый электролит может не подойти, потребуется серия Low ESR или параллельное соединение нескольких керамических конденсаторов.
7.5. Шаг 4: Проверка пиковых токов
Необходимо убедиться, что выбранный транзистор и дроссель выдержат пиковый ток (сумма постоянной составляющей и половины пульсации):
Дроссель должен иметь ток насыщения (Saturation Current) не менее 2,5–3 А, иначе индуктивность резко упадет, и ключ сгорит.
8. Сравнительный анализ и итоговая таблица
Для наглядности сравним понижающий импульсный регулятор с классическим линейным стабилизатором.
| Параметр | Понижающий импульсный регулятор (Buck) | Линейный стабилизатор (LDO) |
|---|---|---|
| КПД | Высокий (85–95%). Мало зависит от разницы \( E — U_{вых} \). | Низкий (определяется как \( U_{вых}/E \)). При большой разнице напряжений — очень низкий. |
| Тепловыделение | Минимальное, часто не требует радиатора. | Высокое, вся разница напряжений уходит в нагрев. |
| Сложность схемы | Высокая (требует дроссель, диод, ШИМ-контроллер). | Низкая (часто 3-выводная микросхема + конденсаторы). |
| Качество напряжения | Присутствуют высокочастотные пульсации и шумы. | Очень чистое выходное напряжение, минимум шумов. |
| Режим работы | Ключевой (импульсный). | Непрерывный (активный). |
9. Интересные факты о понижающих регуляторах
Технология импульсного преобразования скрывает множество неочевидных физических явлений и инженерных решений. Вот 7 фактов, которые расширят ваше понимание темы:
- Эффект отрицательного сопротивления. На входных клеммах понижающий регулятор ведет себя не так, как обычная нагрузка. Поскольку он поддерживает постоянную выходную мощность (\( P = const \)), при снижении входного напряжения его входной ток возрастает. Это создает эффект «отрицательного дифференциального сопротивления», который может вызвать паразитные автоколебания во входных LC-фильтрах, если не принять меры по демпфированию.
- Акустический шум («пение дросселей»). Вы когда-нибудь слышали писк от видеокарты под нагрузкой? Это явление магнитострикции. При протекании мощных импульсов тока сердечник дросселя микроскопически меняет свои размеры с частотой коммутации. Если частота попадает в слышимый диапазон (или возникают субгармоники), дроссель начинает работать как динамик.
- Обратимость энергии. Если заменить диод на второй транзистор (синхронный выпрямитель), схема становится двунаправленной по току. Это означает, что понижающий преобразователь (Buck), если смотреть на него со стороны выхода, превращается в повышающий (Boost). Этот принцип используется в электромобилях при рекуперативном торможении.
- Космическое наследие. Бурное развитие импульсных регуляторов было спровоцировано космической гонкой 1960-х. На спутниках каждый грамм и каждый ватт на счету. Линейные стабилизаторы с их низким КПД выделяли бы слишком много тепла, которое в вакууме трудно рассеять. Buck-конвертеры стали спасением для бортовой электроники «Аполлонов».
- Многофазность в процессорах. Современный CPU потребляет ток более 100–200 А при напряжении около 1 В. Одиночный Buck-регулятор не выдержит такого тока. Поэтому в материнских платах используют многофазные (Multiphase) Buck-конвертеры (до 16 фаз и более), которые работают параллельно со сдвигом по времени, распределяя тепло и кардинально снижая пульсации.
- Проблема «сквозного тока». В синхронных понижающих схемах существует смертельная опасность: если верхний и нижний транзисторы откроются одновременно хотя бы на наносекунду, произойдет короткое замыкание источника питания через транзисторы. Для защиты вводится «мертвое время» (Dead Time) — пауза, когда оба ключа закрыты.
- Битва за мегагерцы. Габариты дросселя и конденсатора обратно пропорциональны частоте. Чтобы разместить мощный преобразователь внутри тонкого смартфона, инженеры подняли частоту коммутации до 3–10 МГц. Это позволяет использовать дроссели размером меньше спичечной головки, хотя и требует особых материалов сердечника.
8. Часто задаваемые вопросы (FAQ)
В чем главное преимущество Buck-регулятора перед линейным стабилизатором (LDO)?
Ключевое преимущество — КПД. Линейный стабилизатор гасит излишек напряжения, превращая его в тепло. Например, при понижении с 12В до 5В КПД линейного стабилизатора будет менее 42%, а остальное уйдет в нагрев. Импульсный понижающий регулятор в том же режиме легко достигнет КПД 90–95%, практически не нагреваясь. Это критично для устройств с батарейным питанием.
Почему дроссель является обязательным элементом схемы?
Дроссель (реактор) выполняет роль инерционного буфера или «маховика» для тока. Он не позволяет току измениться мгновенно. Когда транзистор открыт, дроссель накапливает энергию в магнитном поле, а когда закрыт — отдает ее, поддерживая протекание тока в нагрузку. Без дросселя ток через открытый транзистор был бы ограничен только сопротивлением проводов, что привело бы к аварии и невозможности сглаживания напряжения.
Можно ли понижающим преобразователем повысить напряжение?
Нет, классическая схема понижающего регулятора (Buck Converter) может выдавать на выходе напряжение только меньше входного (\( V_{out} < V_{in} \)). Для повышения напряжения используется другая топология — Boost Converter, а для универсальных задач (когда вход может быть и больше, и меньше выхода) применяют Buck-Boost или SEPIC преобразователи.
Что такое «режим мягкого старта» и зачем он нужен?
При включении преобразователя выходной конденсатор разряжен, что для схемы равносильно короткому замыканию. Если сразу начать работать с максимальной скважностью, возникнет огромный бросок тока, который может сжечь транзистор или вызвать просадку первичной сети. Мягкий старт (Soft Start) плавно увеличивает ширину импульсов в течение нескольких миллисекунд при запуске, позволяя конденсатору зарядиться безопасно.
Как влияет частота переключения на работу схемы?
Это палка о двух концах. Повышение частоты позволяет уменьшить размеры дросселя и конденсаторов (улучшает массогабаритные показатели) и улучшает реакцию на изменение нагрузки. Однако, это также приводит к росту потерь на переключение (динамические потери) в транзисторах и увеличению требований к разводке платы из-за высокочастотных помех (EMI).
Заключение
Понижающий регулятор постоянного напряжения является краеугольным камнем современной силовой электроники. Несмотря на кажущуюся простоту схемы, процессы, протекающие в нем — от накопления энергии в магнитном поле до сложной динамики в режиме прерывистых токов — требуют глубокого понимания для создания надежных устройств.
Ключевыми преимуществами топологии являются высокий КПД и способность преобразовывать большие мощности с малыми потерями. Недостатки в виде электромагнитных помех и пульсаций успешно компенсируются повышением частоты коммутации, использованием современной элементной базы (MOSFET, Low-ESR конденсаторы) и грамотным проектированием входных и выходных фильтров.
Нормативная база
- ГОСТ IEC 61204-2013 — «Источники питания низковольтные, работающие на постоянном токе. Характеристики».
- ГОСТ IEC 62477-1-2022 — «Требования безопасности к системам преобразования силовой электроники и оборудованию».
Список рекомендуемой литературы
- Мелешин В. И. Транзисторная преобразовательная техника. — М.: Техносфера, 2005. — 632 с.
- Розанов Ю. К., Рябчицкий М. В., Кваснюк А. А. Силовая электроника: учебник для вузов. — 2-е изд., стереот. — М.: Издательский дом МЭИ, 2009. — 632 с.
- Семёнов Б. Ю. Силовая электроника: от простого к сложному. — М.: СОЛОН-Пресс, 2005. — 416 с.
Инвертор, ведомый сетью (или зависимый инвертор) — это устройство силовой электроники, которое перекачивает энергию от источника постоянного тока Читать далее...
Однотактный преобразователь напряжения с гальванической развязкой (Single-Ended Isolated DC-DC Converter) — это импульсное устройство преобразования электрической энергии, в Читать далее...
Запираемый тиристор - это мощный полупроводниковый ключ, который объединяет в себе преимущества обычного тиристора (способность коммутировать огромные токи Читать далее...

Конденсатор (от лат. condensare — «уплотнять», «сгущать») — это устройство для накопления энергии электрического поля. История этого прибора Читать далее...