Содержание страницы
Двигатель постоянного тока (ДПТ) — это электромеханический преобразователь энергии, который трансформирует электрическую энергию постоянного тока в механическую энергию вращения.
1. Физические основы и устройство
В основе работы любого электродвигателя лежит закон Ампера. Если поместить проводник с током в магнитное поле, на него начинает действовать сила, стремящаяся вытолкнуть этот проводник из поля. В машинах постоянного тока эта сила преобразуется во вращающий момент.
1.1. Конструкция статора и ротора
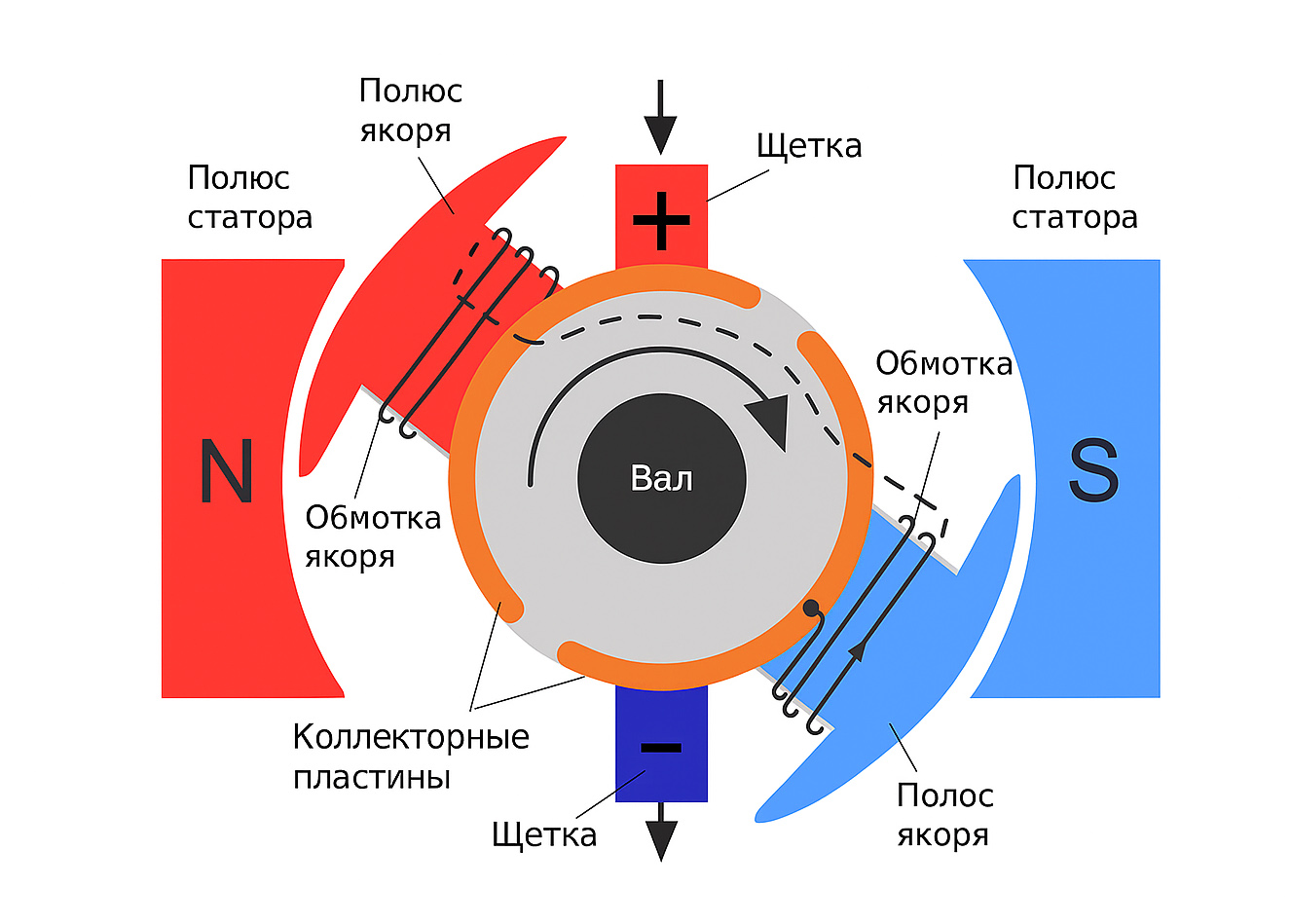
Статор двигателя постоянного тока является неподвижной частью и выполняет функцию создания основного магнитного потока. Он имеет главные полюса, на которых намотана обмотка возбуждения. Эта обмотка создает мощное стационарное магнитное поле во внутреннем пространстве машины.
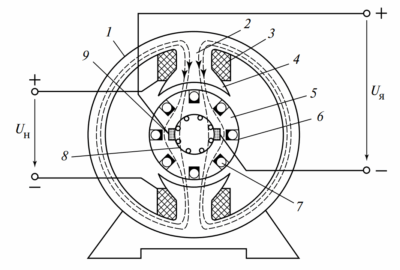
Внутри статора находится вращающаяся часть — ротор, который в машинах постоянного тока принято называть якорем. Якорь состоит из шихтованного сердечника (набранного из листов электротехнической стали для снижения потерь на вихревые токи) и уложенной в его пазы обмотки. Якорь подключается к источнику постоянного тока через специальный щеточно-коллекторный узел.
В двигателе постоянного тока независимого возбуждения, который часто применяется в прецизионных приводах, обмотки статора (возбуждения) и ротора (якоря) подключаются к гальванически развязанным, отдельным источникам питания. Это позволяет управлять магнитным потоком и током якоря независимо друг от друга.
1.2. Механизм возникновения крутящего момента
Ток якоря \( I_я \) взаимодействует с магнитным полем статора, созданным потоком возбуждения \( \Phi \). В результате этого взаимодействия на проводники обмотки якоря действуют электромагнитные силы. Совокупность этих сил создает электромагнитный вращающий момент \( M \), который приводит ротор двигателя в движение.
Для поддержания вращения в одну сторону необходимо, чтобы направление тока в проводниках якоря изменялось в тот момент, когда они переходят из зоны действия северного полюса в зону южного. Эту функцию выполняет коллектор — механический преобразователь частоты.
2. Электромеханические соотношения и формулы
При вращении обмотка ротора пересекает силовые линии магнитного поля статора. Согласно закону электромагнитной индукции, в ней наводится электродвижущая сила (ЭДС) индукции \( E \). Согласно правилу Ленца, эта ЭДС направлена встречно напряжению, приложенному к якорю, поэтому ее часто называют противо-ЭДС.
Противо-ЭДС \( E \) ограничивает ток якоря \( I_я \) и зависит от величины магнитного потока возбуждения \( \Phi \) и частоты вращения якоря \( n \):
Где:
- \( c_E \) — конструктивный коэффициент, постоянный для данного типа двигателя (зависит от числа полюсов, числа витков обмотки и способа намотки).
- \( \Phi \) — магнитный поток одной пары полюсов (Вебер).
- \( n \) — частота вращения (об/мин).
2.1. Уравнение электрического равновесия
Напряжение \( U \), подводимое к зажимам якоря, расходуется на уравновешивание противо-ЭДС \( E \) и на падение напряжения на активном сопротивлении цепи якоря \( R_я \):
Отсюда можно вывести основное уравнение электромеханической характеристики, позволяющее найти частоту вращения ротора:
Где:
- \( U \) — напряжение сети или источника питания, приложенное к якорю (Вольт);
- \( R_я \) — суммарное сопротивление цепи якоря (Ом), включающее сопротивление обмотки, щеточного контакта и добавочных полюсов;
- \( I_я \) — ток якоря (Ампер).
2.2. Анализ рабочих характеристик: Скорость, Момент и Ток
Для инженерного анализа и правильного подбора двигателя критически важно понимать зависимости между основными параметрами: скоростью вращения \( n \), вращающим моментом \( M \) и потребляемым током \( I \). Эти зависимости называются выходными характеристиками двигателя.
Механическая характеристика: Соотношение скорости и нагрузки
Механическая характеристика выражает зависимость угловой скорости ротора от момента сопротивления на валу \( n = f(M) \) при неизменном напряжении питания. Как видно из уравнения \( n = \frac{U — I_я R_я}{c_E \Phi} \), с ростом нагрузки (момента) скорость падает.

График показывает «жесткую» характеристику, свойственную двигателям с независимым или параллельным возбуждением.
- Точка на оси Y (Слева сверху): Скорость идеального холостого хода \( n_0 \). В этой точке нагрузка равна нулю, а скорость максимальна.
- Точка на оси X (Справа снизу): Режим короткого замыкания (стопорения). Вал остановлен нагрузкой (\( n=0 \)), при этом двигатель развивает максимальный пусковой момент, но потребляет критический ток.
- Наклон прямой: Характеризует «жесткость» привода. Чем меньше падение скорости \( \Delta n \) при увеличении нагрузки, тем жестче характеристика.
Электромеханическая характеристика: Ток и Момент
Вторая важнейшая зависимость связывает электрическую мощность, забираемую из сети, с механической работой. Из фундаментальной формулы электромагнитного момента \( M = c_M \Phi I_я \) следует, что при постоянном магнитном потоке \( \Phi \) момент прямо пропорционален току якоря.

Анализируя данный график, можно сделать следующие выводы для эксплуатации:
- Линейность: Увеличение механической нагрузки на валу (например, затупился резец станка или нагружен конвейер) приводит к пропорциональному росту потребляемого тока. Это позволяет использовать амперметр в качестве индикатора нагрузки механизма.
- Низкая нагрузка (слева): Соответствует режиму холостого хода. Ток минимален и расходуется только на покрытие потерь трения в подшипниках и вентиляции.
- Высокая нагрузка (справа): Соответствует режиму перегрузки. Важно следить, чтобы рабочий ток не превышал номинальное значение \( I_{nom} \) длительное время, чтобы избежать перегрева изоляции обмоток (согласно ГОСТ IEC 60034-1 температурные классы изоляции B, F или H).
3. Регулирование частоты вращения
Анализируя формулу \( n = \frac{U — I_я R_я}{c_E \Phi} \), можно выделить три основных способа регулирования скорости вращения ДПТ, что делает их «чемпионами» по управляемости:
- Изменение напряжения на якоре (\( U \)): Основной метод. Позволяет регулировать скорость вниз от номинальной. Обеспечивает высокую жесткость характеристик и сохранение КПД.
- Изменение магнитного потока (\( \Phi \)): Осуществляется путем регулирования тока в обмотке возбуждения. Позволяет увеличивать скорость выше номинальной (ослабление поля).
- Изменение сопротивления цепи якоря (\( R_я \)): Введение добавочных реостатов. Устаревший и неэнергоэффективный метод, приводящий к большим потерям тепла.
Двигатели постоянного тока — наилучшие в отношении регулирования частоты вращения и обладают наибольшим диапазоном ее регулирования (до 1:10000 в современных сервоприводах).
4. Сравнение с асинхронными и синхронными машинами
4.1. Анализ управляемости и динамики
Главное преимущество ДПТ заключается в линейности механической характеристики. Уравнение скорости \( n = \frac{U — I_я R}{c_E \Phi} \) показывает, что, изменяя напряжение якоря или поток возбуждения, можно получить плавное и предсказуемое изменение скорости. Это делает ДПТ идеальными для систем автоматического управления без использования сложной электроники.
Асинхронные двигатели имеют жесткую нелинейную зависимость момента от скольжения. Для точного регулирования скорости АД требуется применение частотных преобразователей (ПЧ) с векторным управлением, которые математически моделируют процессы в двигателе, искусственно разделяя токи намагничивания и момент образующие токи, пытаясь «превратить» АД в подобие ДПТ по управляемости.
Синхронные машины жестко привязаны к частоте сети \( n = \frac{60f}{p} \). Их главное преимущество в энергетике — возможность генерации реактивной мощности (работа с опережающим \( \cos \varphi \)), что позволяет компенсировать реактивную нагрузку предприятия.
4.2. Пусковые свойства и перегрузочная способность
В тяговом приводе (локомотивы, трамваи, подъемные краны) критически важен пусковой момент. Здесь ДПТ последовательного возбуждения вне конкуренции: их момент пропорционален квадрату тока \( M \sim I^2 \) (до насыщения магнитной системы). Это обеспечивает гигантское усилие при старте.
Асинхронный двигатель при прямом пуске потребляет ток, в 5–7 раз превышающий номинальный, при этом пусковой момент относительно невелик. Это требует применения устройств плавного пуска или переключения «звезда-треугольник».
Синхронный двигатель сам по себе не имеет пускового момента при подключении к сети промышленной частоты (ротор не успевает войти в синхронизм за полпериода). Для пуска используют специальную демпферную обмотку (асинхронный пуск) или частотный разгон.
4.3. Сводная таблица характеристик различных типов двигателей
| Параметр | Двигатель постоянного тока (ДПТ) | Асинхронный двигатель (АД) с КЗ ротором | Синхронная машина (СМ) |
|---|---|---|---|
| Принцип управления (Управляемость) | Высокая. Простая и линейная регулировка скорости и момента напряжением якоря или током возбуждения. Отличная динамика. | Средняя/Сложная. Требует дорогостоящих преобразователей частоты (ПЧ/VFD) и векторного управления для точных задач. | Специфическая. Абсолютно жесткая скорость, зависящая только от частоты сети. Уникальная возможность регулирования \( \cos \varphi \). |
| Пусковой момент | Высокий. Особенно у ДПТ последовательного возбуждения (\( M \propto I^2 \)). Идеален для тяжелого пуска под нагрузкой. | Средний. Высокий пусковой ток (5-7 \( I_{nom} \)) при относительно низком моменте. Требует «мягких пускателей». | Отсутствует (при прямом включении). Требует асинхронного пуска (демпферная обмотка) или частотного разгона. |
| Конструкция и обслуживание | Сложное. Наличие коллекторно-щеточного узла требует регулярного осмотра, замены щеток, проточки коллектора. Чувствительность к пыли. | Минимальное. «Рабочая лошадка» промышленности. Простая конструкция («беличья клетка»), отсутствуют скользящие контакты. | Среднее. Наличие контактных колец (в классической схеме) или использование бесщеточных систем возбуждения (exciter). |
| Эффективность (КПД) | Высокая при номинальной нагрузке. В современных бесколлекторных (BLDC) вариантах — очень высокая (>90%). | Высокая (класс IE3, IE4), но падает при недогрузке и регулировании скорости без качественного ПЧ. | Очень высокая. Особенно у машин большой мощности (МВт). Отсутствуют потери скольжения в роторе. |
| Стоимость и применение | Высокая (много меди, сложная сборка). Применяется в прецизионных станках, электротранспорте, металлургии. | Низкая. Самый массовый двигатель. Насосы, вентиляторы, конвейеры, общепромышленные механизмы. | Высокая. Оправдана для мощных приводов (компрессоры, мельницы) и генерации электроэнергии. |
5. Преимущества и недостатки
Преимущества
- Линейность характеристик: Простота построения систем автоматического управления.
- Динамика: Высокое быстродействие при изменении управляющего сигнала.
- Компактность при высокой мощности: В специальных исполнениях превосходят машины переменного тока.
Недостатки
- Коллекторный узел: Источник радиопомех, искрения и механического износа.
- Цена: Дороговизна изготовления и эксплуатации.
- Ограничения: Невозможность работы во взрывоопасных и агрессивных средах без специальной герметизации (из-за искрения щеток).
6. Интересные факты о двигателях постоянного тока
- Самый первый электродвигатель в мире (Б.С. Якоби, 1834) был именно двигателем постоянного тока.
- В современных электромобилях часто используются бесколлекторные двигатели постоянного тока (BLDC), которые конструктивно являются «вывернутыми наизнанку» ДПТ — магниты на роторе, обмотки на статоре, а роль коллектора выполняет электроника.
- Двигатели серии ДПТ до сих пор являются основным типом тяговых двигателей на старых моделях трамваев, троллейбусов и метрополитена.
- Существуют микродвигатели постоянного тока размером меньше рисового зерна, используемые в медицине (эндоскопы).
- Рекуперативное торможение (возврат энергии в сеть) проще всего реализуется именно на машинах постоянного тока — двигатель переходит в режим генератора автоматически, если \( E > U \).
- «Реакция якоря» — это паразитное явление, при котором магнитное поле тока якоря искажает основное поле возбуждения, сдвигая физическую нейтраль и вызывая искрение.
- Для подавления искрения в мощных ДПТ устанавливают дополнительные полюса между главными полюсами.
7. FAQ: Часто задаваемые вопросы
1. Почему двигатель постоянного тока искрит?
Искрение возникает в узле коммутации (щеточно-коллекторном узле). Причины могут быть механическими (биение коллектора, плохой прижим щеток) или электромагнитными (реактивная ЭДС в коммутируемых секциях, нескомпенсированная реакция якоря).
2. Почему двигатель постоянного тока не вращается при подключении к сети переменного тока?
Потому что магнитный поток и ток якоря будут менять направление с частотой сети (50 Гц), но не синхронно. Средний момент будет равен нулю, а двигатель будет сильно гудеть и греться. Исключение — универсальные коллекторные двигатели (как в дрелях), но они имеют особую конструкцию статора.
3. Зачем нужны щетки?
Щетки (обычно графитовые или медно-графитовые) служат скользящим контактом для передачи тока на вращающийся коллектор якоря.
4. Что будет, если у двигателя с последовательным возбуждением пропадет нагрузка на валу?
Произойдет «разнос» двигателя. Скорость вращения \( n \) обратно пропорциональна потоку \( \Phi \). Без нагрузки ток падает, поток падает, и скорость стремится к бесконечности, что может разрушить двигатель центробежными силами.
5. Как изменить направление вращения (реверс)?
Нужно изменить полярность подключения либо обмотки якоря, либо обмотки возбуждения. Если поменять полярность и там, и там одновременно — направление вращения не изменится.
6. Что такое «бесколлекторный» двигатель постоянного тока?
Это двигатель, где механический коммутатор заменен электронным блоком управления (инвертором), коммутирующим обмотки статора в зависимости от положения ротора.
Заключение
Двигатели постоянного тока остаются эталоном качества регулирования в электроприводе. Понимание физики их работы (взаимодействие тока и поля) и математического описания (уравнения равновесия ЭДС и моментов) является фундаментом для изучения любых других типов электромеханических преобразователей.
Нормативная база
- ГОСТ IEC 60034-1-2014 — Машины электрические вращающиеся. Часть 1. Номинальные значения и технические характеристики.
- ГОСТ 27471-87 — Машины электрические вращающиеся. Термины и определения.
- ГОСТ 183-74 — Машины электрические вращающиеся. Общие технические условия.
- ГОСТ 11828-86 — Машины электрические вращающиеся. Общие методы испытаний.
Рекомендуемая литература:
- Копылов И.П. «Электрические машины», учебник для вузов.
- Вольдек А.И. «Электрические машины. Машины постоянного тока и трансформаторы».
- Кацман М.М. «Электрические машины».

Электрический контакт — это критически важный узел любой электротехнической системы, представляющий собой квазистационарное или коммутируемое соприкосновение двух проводников, Читать далее...
Резонанс токов — это особое явление в электрической цепи с параллельным соединением индуктивности и емкости, при котором реактивная Читать далее...
Соединения элементов в электрической цепи — это фундаментальные способы их физического и схемотехнического объединения для создания функционального устройства. Читать далее...
Электропроводность — это фундаментальное свойство вещества, характеризующее его способность проводить электрический ток. Это явление возникает, когда под действием внешнего электрического Читать далее...