Содержание страницы
- 1. Общие сведения и назначение
- 2. Физика процесса: Вращающееся магнитное поле
- 3. Принцип действия и устройство асинхронного двигателя
- 4. Скольжение и частота вращения
- 5. Электромагнитные процессы и токи двигателя
- 6. Эквивалентная схема замещения
- 7. Вращающий момент
- 8. Механическая характеристика
- 9. Рабочие характеристики
- 10. Пуск и регулирование скорости
- 11. Сравнение с другими типами двигателей
- 12. Преимущества и недостатки асинхронного двигателя
- 13. Интересные факты и FAQ
- 14. Часто задаваемые вопросы (FAQ)
- Заключение
Асинхронный электродвигатель (или асинхронная машина, asynchronous motor) — это электрическая машина переменного тока, преобразующая электрическую энергию в механическую. Её главная особенность заключается в том, что частота вращения ротора всегда отличается от частоты вращения магнитного поля статора. Благодаря своей надежности и неприхотливости, это устройство по праву называют «рабочей лошадкой» современной промышленности.
1. Общие сведения и назначение
Асинхронные двигатели являются самым массовым классом электромеханических преобразователей энергии. Статистика показывает, что более 80% всего мирового парка электродвигателей составляют именно асинхронные двигатели. Они потребляют более половины всей электроэнергии, вырабатываемой в мире.
Такое доминирующее положение на рынке и в промышленности обусловлено комплексом уникальных факторов:
- Конструктивная простота: Отсутствие коллекторно-щеточного узла (в наиболее распространенных моделях) делает их крайне надежными.
- Низкая стоимость: Технология производства отработана десятилетиями, используются доступные материалы (электротехническая сталь, медь, алюминий).
- Эксплуатационная неприхотливость: Минимальные требования к техническому обслуживанию, высокая стойкость к перегрузкам.
- Прямое подключение к сети: Возможность работы напрямую от трехфазной сети переменного тока без сложных преобразователей (для нерегулируемых приводов).
Классификация по числу фаз и исполнению:
- Трехфазные: Основной промышленный тип.
- Однофазные: Широко применяются в бытовой технике (холодильники, вентиляторы, стиральные машины), где отсутствует трехфазная сеть.
- Двухфазные: Используются в специфических системах автоматики и управления (конденсаторные двигатели часто рассматриваются как разновидность двухфазных).
- Линейные: Для создания прямолинейного движения (транспорт, конвейеры) без передаточных механизмов.
Диапазон мощностей выпускаемых двигателей колоссален: от миниатюрных устройств мощностью в несколько ватт до гигантов в несколько мегаватт, приводящих в движение насосы магистральных нефтепроводов или дымососы ТЭЦ.
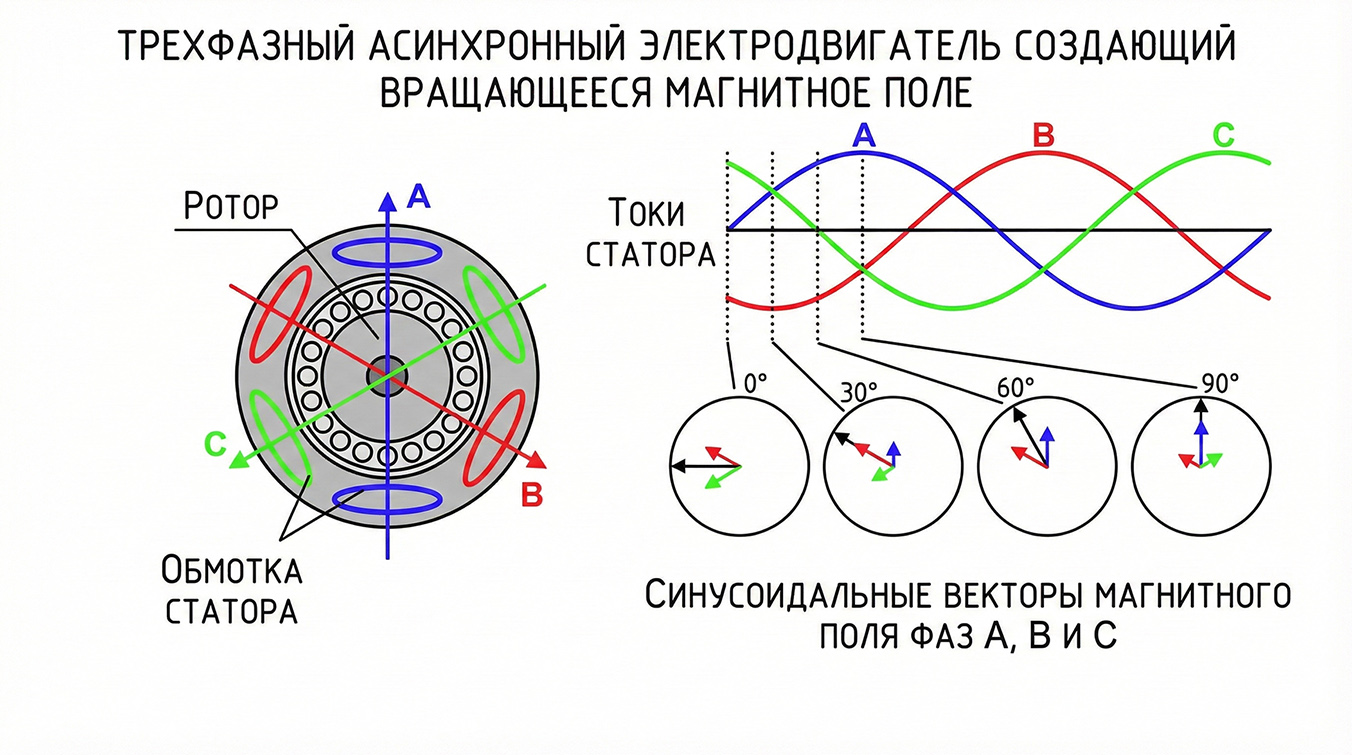
2. Физика процесса: Вращающееся магнитное поле
Сердцем асинхронного двигателя является вращающееся магнитное поле. Это явление — фундамент работы всех многофазных машин переменного тока.
В простейшем случае (двухполюсная машина) статор содержит три обмотки (фазы A, B, C), оси которых геометрически смещены в пространстве статора на угол 120°. Если подать на эти обмотки трехфазную систему токов, которые сдвинуты во времени также на 120° (электрических градусов), происходит векторное сложение магнитных полей каждой фазы.
Результирующий вектор магнитной индукции \( B \) обладает двумя свойствами:
- Его модуль (амплитуда) остается постоянным во времени.
- Он вращается в пространстве с угловой частотой \( \omega \), которая жестко привязана к частоте питающей сети \( f_1 \).
Аналогия: Представьте, что вы вращаете постоянный магнит на веревке над столом. Поле вращается механически. В статоре асинхронного двигателя нет движущихся частей, но благодаря сдвигу фаз токов, магнитное поле «бежит» по окружности статора точно так же, как если бы внутри вращался реальный магнит. Направление вращения этого поля легко изменить, поменяв местами любые две фазы питающего напряжения (изменив чередование фаз).
3. Принцип действия и устройство асинхронного двигателя
Как и любая электрическая машина вращательного действия, асинхронный двигатель состоит из двух основных частей, разделенных воздушным зазором: неподвижного статора и вращающегося ротора.
3.1. Статор
Статор выполняет функцию индуктора — создателя магнитного поля. Он состоит из корпуса (станины) и сердечника (магнитопровода) с обмоткой.
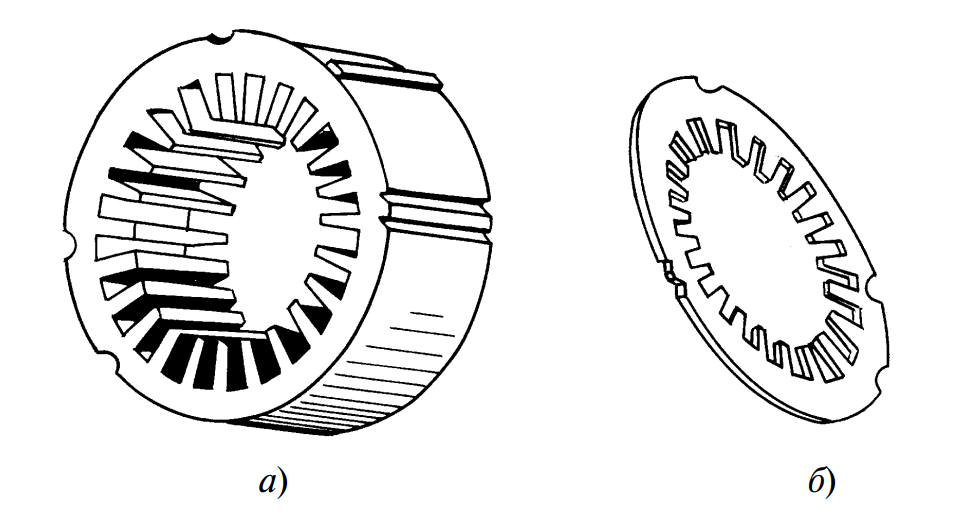
Рис. 1. Конструкция статора:
а — статор в сборе (готовый узел с уложенной обмоткой);
б — пластины статора (отдельные листы электротехнической стали).
Магнитопровод статора (см. Рис. 1, б) набирается из тонких (обычно 0,35–0,5 мм) листов электротехнической стали. Почему не цельный кусок металла? Это необходимо для борьбы с вихревыми токами (токами Фуко). Изоляция каждого листа лаком разрывает пути для вихревых токов, существенно снижая тепловые потери в стали. В пазы, выштампованные на внутренней поверхности сердечника, укладывается статорная обмотка (обычно медная).
3.2. Ротор
Ротор располагается внутри расточки статора. Его сердечник также шихтованный (набран из листов стали) для снижения потерь. Существует два принципиально разных типа роторов.
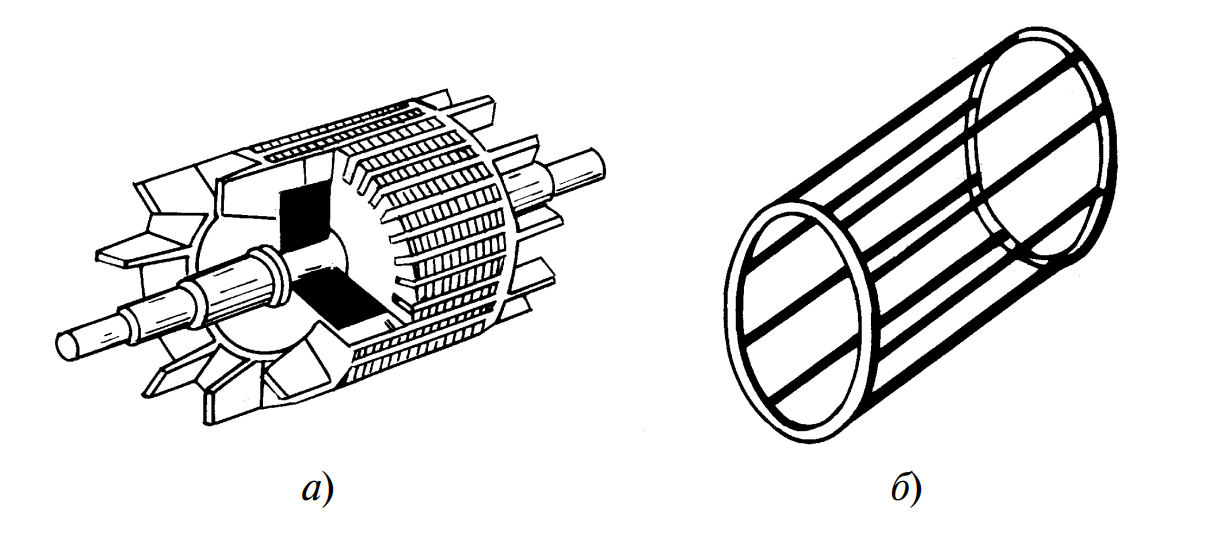
Рис. 2. Устройство ротора:
а — ротор в сборе (на валу с подшипниками);
б — «беличье колесо» (схематичное изображение короткозамкнутой обмотки).
1) Короткозамкнутый ротор («Беличья клетка»)
Это наиболее распространенная конструкция (см. Рис. 2). В пазы ротора заливается расплавленный алюминий (в мощных двигателях — вбиваются медные стержни). По торцам эти стержни замыкаются накоротко кольцами. Внешне эта конструкция, если убрать сталь, напоминает колесо, в котором бегают белки. Ломаться здесь практически нечему: нет контактов, нет изоляции, которая может прогореть (кроме изоляции листов стали).
2) Фазный ротор
У двигателя с фазным ротором в пазах укладывается полноценная трехфазная обмотка, аналогичная статорной. Концы фаз выводятся на контактные кольца на валу, к которым прижимаются щетки. Это позволяет включать в цепь ротора добавочные резисторы для плавного пуска или регулирования скорости. Однако наличие щеточного узла снижает надежность и усложняет обслуживание.
3.3. Как возникает вращение (Принцип действия)
Процесс преобразования энергии можно описать последовательностью этапов:
1. При подаче напряжения на обмотку статора возникает вращающееся магнитное поле.
2. Силовые линии этого поля пересекают проводники обмотки ротора (которые в первый момент неподвижны).
3. Согласно закону электромагнитной индукции, в проводниках ротора наводится ЭДС индукции.
4. Так как обмотка ротора замкнута (кольцами или реостатом), в ней начинают протекать токи ротора \( I_2 \).
5. Ток в роторе взаимодействует с магнитным полем статора. Согласно закону Ампера, на проводник с током в магнитном поле действует электромагнитная сила (сила Ампера).
6. Совокупность сил, действующих на все стержни ротора, создает вращающий электромагнитный момент, увлекающий ротор вслед за полем.
4. Скольжение и частота вращения
Скорость вращения магнитного поля (синхронная скорость) зависит от частоты сети и конструкции обмотки (числа пар полюсов \( p \)).
Формула для расчета синхронной частоты вращения:
Где:
\( f_1 \) — частота питающей сети (в РФ стандарт 50 Гц);
\( p \) — число пар полюсов (не путать с общим числом полюсов \( 2p \)).
Для сети 50 Гц возможны следующие синхронные частоты вращения (Таблица 1):
Таблица 1. Зависимость частоты вращения поля от числа пар полюсов (при \( f = 50 \) Гц)
| Число пар полюсов, \( p \) | 1 | 2 | 3 | 4 | 5 | 8 | 10 |
|---|---|---|---|---|---|---|---|
| Синхронная скорость \( n_1 \), об/мин | 3000 | 1500 | 1000 | 750 | 600 | 375 | 300 |
Разность между скоростью поля \( n_1 \) и скоростью ротора \( n_2 \) называется скольжением (\( s \)). Это безразмерная величина, обычно выражаемая в долях единицы или процентах:
Отсюда частоту вращения ротора можно выразить как:
Значения скольжения в различных режимах:
- Пуск: \( n_2 = 0 \), следовательно \( s = 1 \).
- Идеальный холостой ход: \( n_2 \approx n_1 \), следовательно \( s \approx 0 \).
- Номинальная нагрузка: Для большинства двигателей \( s \) составляет 0.02 – 0.08 (2–8%).
5. Электромагнитные процессы и токи двигателя
Рассмотрим физику электрических процессов глубже. Асинхронный двигатель можно представить как вращающийся трансформатор.
В статоре:
Переменное магнитное поле наводит в обмотке статора ЭДС самоиндукции \( E_1 \). Ее действующее значение:
Где:
\( w_1 \) — число витков фазы статора;
\( k_1 \) — обмоточный коэффициент (учитывает, что витки распределены по пазам, а не сосредоточены в одной точке);
\( \Phi_m \) — амплитуда основного магнитного потока.
В роторе:
Частота тока в роторе \( f_2 \) не постоянна, она зависит от скольжения. Частота перемагничивания ротора — это частота, с которой поле «обгоняет» ротор:
ЭДС, наводимая в роторе \( E_2 \), также зависит от скольжения. Если обозначить \( E_{2k} \) как ЭДС неподвижного (заторможенного) ротора (при \( s=1 \)), то в рабочем режиме:
Уравнения равновесия напряжений
Для фазы статора (по второму закону Кирхгофа):
Здесь \( R_1 \) и \( X_1 \) — активное и индуктивное сопротивления рассеяния обмотки статора. Обычно падение напряжения на сопротивлениях мало, поэтому можно считать \( U_1 \approx E_1 \).
Для цепи ротора (который замкнут накоротко, внешнего напряжения нет):
Учитывая зависимость от скольжения, ток ротора равен:
6. Эквивалентная схема замещения
Для упрощения расчетов и анализа работы двигателя реальную машину заменяют электрической схемой замещения (Рис. 3). Это стандартный инженерный прием. Поскольку частота тока в роторе (\( f_2 \)) отличается от частоты в статоре (\( f_1 \)), для объединения их в одну гальваническую цепь параметры ротора «приводят» к частоте статора и числу витков статора.

Рис. 3. Т-образная схема замещения асинхронного двигателя
Пояснение к элементам:
\( R_1, X_1 \) — параметры статора;
\( R_m (R_0), X_m (X_0) \) — ветвь намагничивания (потери в стали и создание потока);
\( R’_2, X’_2 \) — приведенные параметры ротора;
\( R_{mech} = R’_2 \frac{1-s}{s} \) — фиктивное сопротивление, имитирующее механическую нагрузку.
Главная особенность схемы: механическая мощность на валу \( P_{mex} \) моделируется переменным активным сопротивлением \( R_{db} \) (или \( R_{mech} \)), которое зависит от скольжения \( s \). Это позволяет рассчитывать механические характеристики чисто электрическими методами.
7. Вращающий момент
Вращающий момент \( M \) возникает в результате взаимодействия тока ротора с магнитным полем. Из энергетического баланса (мощность на валу равна электромагнитной мощности за вычетом потерь) выводится формула момента.
Зависимость момента от скольжения описывается сложной формулой, которая в упрощенном виде (формула Клосса) выглядит так:
Где:
\( M_{max} \) — максимальный (критический) момент;
\( s_{kr} \) — критическое скольжение, при котором достигается максимум момента.
Критическое скольжение определяется соотношением активного и реактивного сопротивлений ротора:
8. Механическая характеристика
Механическая характеристика — это зависимость частоты вращения \( n \) (или скольжения) от момента на валу \( M \). Это «паспорт» динамических свойств двигателя.
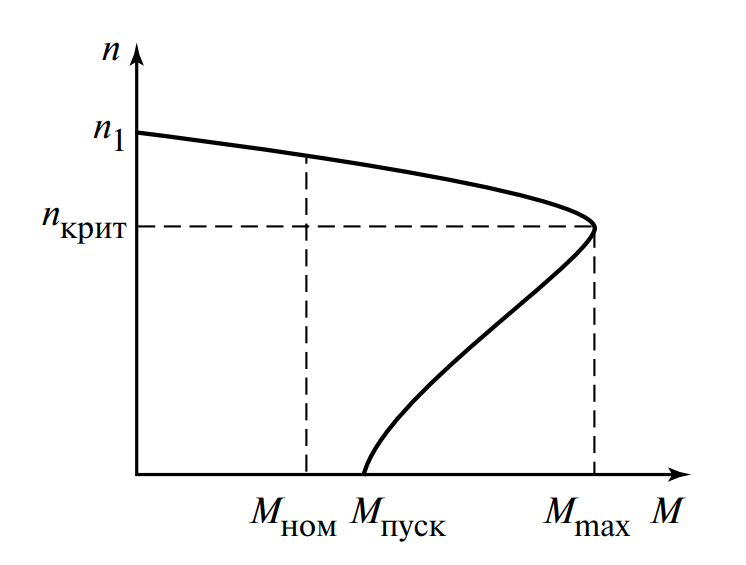
Рис. 4. Естественная механическая характеристика асинхронного двигателя
Основные точки:
\( M_{nom} \) — номинальный момент (рабочая точка);
\( M_{max} \) — максимальный (опрокидывающий) момент;
\( M_{pusk} \) — пусковой момент (при \( n=0 \)).
Анализ графика (Рис. 4) показывает:
- Рабочий участок: Линейная часть от холостого хода до \( M_{nom} \). Здесь характеристика «жесткая» — скорость мало меняется при изменении нагрузки.
- Перегрузочная способность: Отношение \( M_{max} / M_{nom} \) обычно составляет 1.7 – 3.0. Если нагрузка превысит \( M_{max} \), двигатель «опрокидывается» — резко останавливается, ток возрастает до пускового значения, возникает риск аварии.
Влияние активного сопротивления ротора
В двигателях с фазным ротором можно менять \( R_2 \). Как это влияет на характеристику?
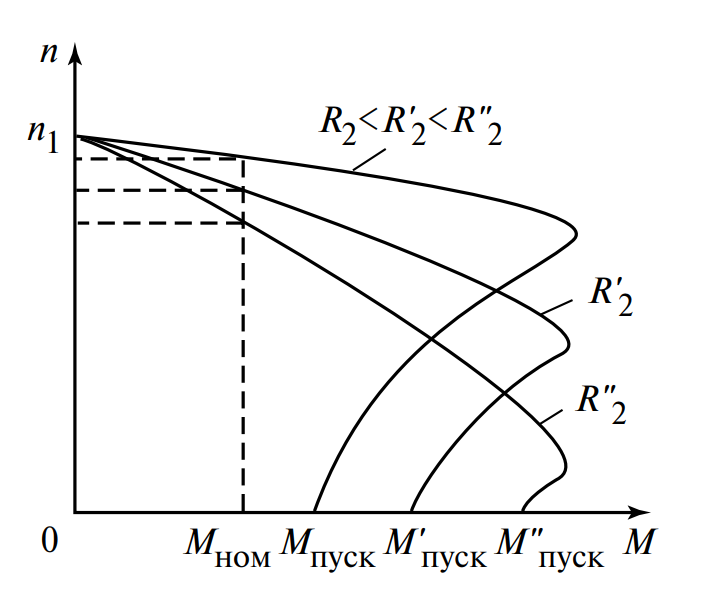
Рис. 5. Искусственные механические характеристики при введении резисторов в цепь ротора
Согласно формуле критического скольжения \( s_{kr} \sim R_2 \). При увеличении сопротивления ротора:
- Величина максимального момента \( M_{max} \) не меняется.
- Критическое скольжение смещается в область больших значений.
- Пусковой момент \( M_{pusk} \) возрастает (до определенного предела).
Это свойство используют для крановых двигателей: вводя реостат, мы получаем огромный пусковой момент и плавную регулировку скорости (характеристика становится «мягкой»).
9. Рабочие характеристики
Рабочие характеристики — это зависимости параметров (\( I_1, P_1, \eta, \cos \phi, s \)) от полезной мощности на валу \( P_2 \).
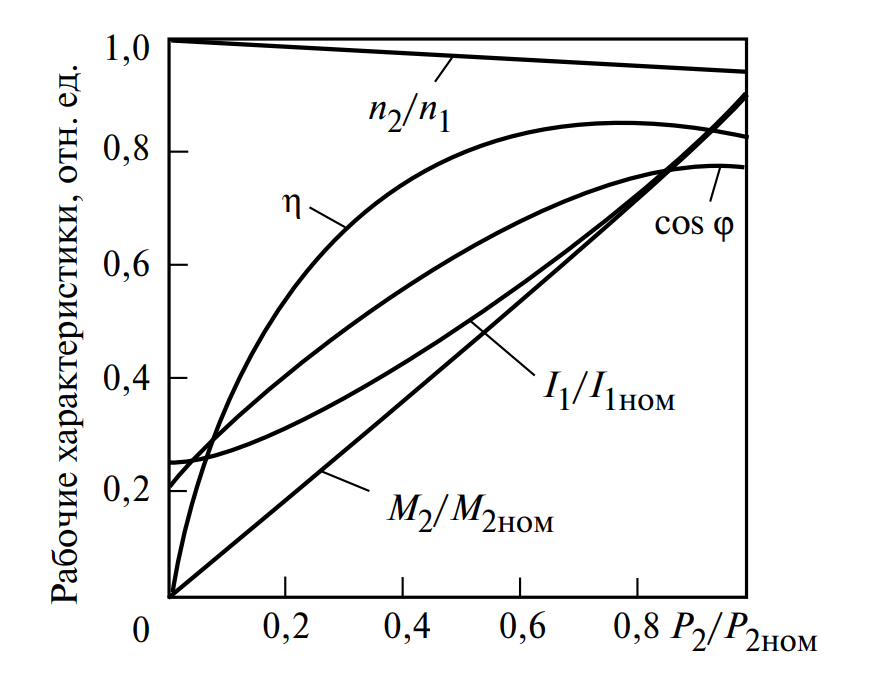
Рис. 6. Рабочие характеристики асинхронного двигателя
Анализ кривых (Рис. 6):
- Скольжение \( s \): Растет почти линейно с нагрузкой, но незначительно (кривая жесткая).
- Коэффициент мощности (\( \cos \phi \)): При холостом ходе очень низкий (0.2–0.3), так как ток идет в основном на создание магнитного поля (реактивная мощность). При номинальной нагрузке достигает максимума (0.8–0.95).
- КПД (\( \eta \)): Сначала быстро растет, достигает максимума при загрузке 70-80% от номинала, затем плавно снижается из-за роста потерь в меди обмоток (\( I^2 R \)).
10. Пуск и регулирование скорости
Проблемы пуска
Прямой пуск асинхронного двигателя сопровождается броском тока, превышающим номинальный в 5–7 раз. Это вызывает:
- Термический удар по изоляции обмоток.
- Механический удар по редукторам и муфтам.
- Просадку напряжения в сети, что вредит другой электронике.
Методы ограничения пускового тока:
1. Переключение «Звезда-Треугольник»: На время пуска обмотки включают в звезду (напряжение на фазе в \( \sqrt{3} \) раз меньше), затем переключают в треугольник. Момент при этом падает в 3 раза.
2. Устройства плавного пуска (УПП): Тиристорные регуляторы, плавно поднимающие напряжение.
3. Частотный пуск: С помощью преобразователя частоты (ПЧ) — самый совершенный метод.
Регулирование частоты вращения
Вспомним формулу: \( n = \frac{60 f_1}{p} (1 — s) \).
Три способа регулирования вытекают из переменных формулы:
- Изменение скольжения \( s \): Реостатное регулирование (только для фазного ротора) или изменение напряжения. Неэффективно (большие потери тепла).
- Изменение числа пар полюсов \( p \): Многоскоростные двигатели (например, лифтовые). Ступенчатое регулирование (например, 1500 -> 750 об/мин).
- Частотное регулирование \( f_1 \): Изменение частоты питающего тока. Самый современный метод. Позволяет плавно менять скорость от 0 до значений выше номинальных, экономит до 30-50% электроэнергии в насосных и вентиляторных установках.
11. Сравнение с другими типами двигателей
| Характеристика | Асинхронный двигатель (АД) | Двигатель постоянного тока (ДПТ) | Синхронный двигатель (СД) |
|---|---|---|---|
| Устройство | Простая конструкция, отсутствуют контактные узлы (короткозамкнутый ротор) | Более сложная конструкция: имеется коллекторно-щеточный узел | Сложная конструкция, требуется система возбуждения |
| Цена | Низкая, минимальные эксплуатационные затраты | Высокая из-за сложного устройства | Высокая, особенно при наличии систем автоматического возбуждения |
| Пусковой момент | Средний, зависит от напряжения и схемы пуска | Высокий, хорошо регулируемый | Низкий, требуется применение специальных пусковых методов |
| Стабильность скорости | Зависит от нагрузки (наличие скольжения) | Хорошо регулируется в широком диапазоне | Жёсткая характеристика: n ≈ const при любой нагрузке |
| Коэффициент мощности | Отстающий, потребляет реактивную мощность Q | Не является ключевой характеристикой для ДПТ (питание — постоянный ток) | Регулируемый: возможно достижение cos φ = 1 или опережающего режима |
12. Преимущества и недостатки асинхронного двигателя
Преимущества:
- Высокая надежность и большой ресурс работы благодаря простоте конструкции и отсутствию коллекторно-щеточного узла.
- Низкая стоимость изготовления и обслуживания из-за минимального числа элементов, подверженных износу.
- Возможность прямого подключения к сети переменного тока без промежуточных преобразователей.
- Хорошее отношение массы и габаритов к выходной мощности по сравнению с двигателями постоянного тока.
- Высокая перегрузочная способность и механическая прочность конструкции ротора (особенно короткозамкнутого).
- Устойчивость к пыли, вибрациям и тяжёлым условиям эксплуатации.
Недостатки:
- Потребление реактивной мощности, что снижает коэффициент мощности (cos φ) сети и может требовать компенсации.
- Ограниченный диапазон регулирования частоты вращения без применения частотно-регулируемого привода (ПЧ).
- Повышенные пусковые токи (в 5–7 раз выше номинального), создающие нагрузку на сеть.
- Сильная зависимость электромагнитного момента от квадрата напряжения питания, что вызывает падение момента при снижении U.
- Сравнительно низкая энергоэффективность на малых нагрузках и ухудшение параметров при снижении скольжения.
13. Интересные факты и FAQ
- МАСШТАБИРУЕМОСТЬ: Самый маленький асинхронный двигатель помещается на кончике пальца, а самый большой (например, для перекачки воды в каналах) имеет диаметр более 10 метров и потребляет десятки мегаватт.
- ИСТОРИЯ ИЗОБРЕТЕНИЯ: Никола Тесла и Галилео Феррарис изобрели асинхронный двигатель практически одновременно, что привело к многолетним патентным спорам.
- ГЕНЕРАТОРНЫЙ РЕЖИМ: Асинхронный двигатель может работать как генератор. Если крутить его ротор быстрее магнитного поля (например, ветром или водой), он начнет отдавать энергию в сеть.
- ПРИМЕНЕНИЕ В TESLA: В электромобилях Tesla (ранние Model S) использовались именно модифицированные асинхронные двигатели, в то время как большинство конкурентов ставили синхронные машины на постоянных магнитах.
- ЭНЕРГОЭФФЕКТИВНОСТЬ: Эффективность современных двигателей класса IE4 и IE5 (Super/Ultra Premium Efficiency) превышает 96%.
- МАГНИТОСТРИКЦИЯ: Звук «гудения» двигателя часто вызван магнитострикцией — микроскопической деформацией листов стали статора под действием переменного магнитного поля.
- ОБРЫВ ФАЗЫ: Если у работающего трехфазного двигателя оборвется одна фаза, он продолжит вращаться, но будет сильно гудеть, греться и не сможет развить номинальную мощность («двухфазный режим»).
14. Часто задаваемые вопросы (FAQ)
1. Почему двигатель называется «асинхронным»?
Потому что ротор вращается не синхронно с магнитным полем статора, а с небольшим отставанием (скольжением). Синхронизм невозможен по принципу действия.
2. Что будет, если подать на двигатель 60 Гц вместо 50 Гц?
Скорость вращения увеличится на 20%. Момент на валу снизится, а пусковой ток может возрасти. Двигатель может перегреться, если нагрузка на валу (например, вентилятор) сильно зависит от скорости.
3. Как поменять направление вращения?
Достаточно поменять местами любые два провода (фазы) на клеммах статора.
4. Можно ли подключить трехфазный двигатель в обычную розетку 220В?
Можно, используя схему с фазосдвигающим конденсатором («треугольник»). Но при этом двигатель потеряет 30–50% своей мощности и будет иметь очень слабый пусковой момент.
5. Что такое класс нагревостойкости изоляции F?
Это международная маркировка, означающая, что изоляция обмоток двигателя выдерживает длительный нагрев до 155°C без разрушения.
Заключение
Асинхронный двигатель — это гениальное в своей простоте изобретение, которое более века движет нашу цивилизацию. Несмотря на появление новых типов приводов, асинхронная машина, усиленная современными частотными преобразователями, остается безальтернативным лидером в промышленности благодаря своей надежности и низкой стоимости владения.
Нормативная база и литература
При проектировании и эксплуатации важно руководствоваться действующими стандартами (перед применением обязательно проверять актуальность на сайте Росстандарта):
- ГОСТ IEC 60034-1-2014 — Машины электрические вращающиеся. Часть 1. Номинальные параметры и эксплуатационные характеристики.
- ГОСТ 31606-2012 — Машины электрические вращающиеся. Двигатели асинхронные мощностью от 0,12 до 400 кВт включительно. Общие технические требования.
- ГОСТ 183-74 — Машины электрические вращающиеся. Общие технические условия (базовый советский стандарт, во многом действующий).
- ПУЭ (Правила устройства электроустановок) — Глава 5.3. Электродвигатели и их коммутационные аппараты.
Рекомендуемая литература:
- Копылов И.П. «Электрические машины». Учебник для вузов.
- Вольдек А.И. «Электрические машины». Классический труд по теории машин.
- Кацман М.М. «Электрические машины». Доступное изложение для студентов колледжей.
Индуктивность — это фундаментальное свойство электрической цепи, характеризующее её способность накапливать энергию в магнитном поле при протекании электрического Читать далее...
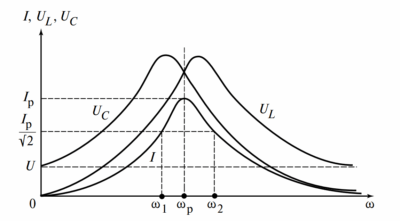
Резонанс напряжений — это особое состояние электрической цепи переменного тока, содержащей последовательно соединенные индуктивность и емкость, при котором Читать далее...
Периодический несинусоидальный ток (или напряжение) — это любой периодический сигнал в электрической цепи, форма которого отличается от Читать далее...
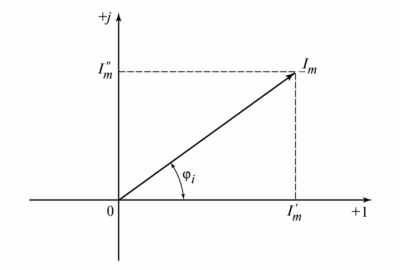
Что это и зачем нужно? Символический метод (или метод комплексных амплитуд) — это мощнейший математический инструмент, который превращает Читать далее...