Содержание страницы
- 1. Физические основы взаимодействия
- 2. Кинематика сканирования
- 3. Система автоматического слежения (Обратная связь)
- 4. Конструкция измерительной головки
- 5. Устройство зондового датчика
- 6. Принцип резонансного детектирования
- 7. Формирование и цифровая обработка изображений
- 8. Электрические средства измерения линейных размеров
- 9. Сравнительная таблица методов микроскопии
- 10. Преимущества и недостатки NanoEducator
- 11. Интересные факты о зондовой микроскопии
- 12. Часто задаваемые вопросы (FAQ)
- Заключение
Сканирующий зондовый микроскоп (СЗМ) — это класс приборов для исследования поверхности материалов на нанометровом и атомарном уровне, в которых формирование изображения происходит за счёт взаимодействия острия зонда с поверхностью образца при его построчном сканировании.
В отличие от оптических и электронных микроскопов, СЗМ не использует линз — разрешение достигается благодаря чрезвычайно острому зонду и чувствительным датчикам, регистрирующим силы, ток или иные физические взаимодействия между зондом и поверхностью.
NanoEducator — это специализированный учебно-научный комплекс, разработанный для того, чтобы студенты и начинающие исследователи могли освоить принципы нанотехнологий. Он упрощен конструктивно, но сохраняет все физические принципы «взрослых» атомно-силовых микроскопов. В данной статье мы детально разберем его механику, электронику и алгоритмы обработки данных.
1. Физические основы взаимодействия
Как и в классической атомно-силовой микроскопии (АСМ), принцип работы СЗМ NanoEducator базируется на регистрации зависимости сил взаимодействия между зондом и поверхностью. В качестве зонда здесь выступает острозаточенная вольфрамовая игла.
Микроскоп использует два типа взаимодействия:
- Силовое взаимодействие: Силы Ван-дер-Ваальса, электростатические и капиллярные силы, возникающие при сближении острия иглы с поверхностью.
- Токовое взаимодействие (Туннельный эффект): Протекание туннельного тока между проводящим зондом и проводящим образцом при подаче напряжения смещения (режим СТМ).
Согласно теоретическим моделям, потенциал взаимодействия Леннарда-Джонса \( V(r) \) описывает зависимость энергии от расстояния:
Где \( r \) — расстояние между центрами частиц. В NanoEducator мы работаем на расстояниях, где эти силы становятся измеримыми и управляемыми.
2. Кинематика сканирования
Ключевое отличие NanoEducator от многих промышленных АСМ заключается в кинематической схеме. В данной модели зонд закрепляется неподвижно, в то время как образец перемещается относительно зонда. Это решение упрощает конструкцию сканирующей головки и делает её более надежной для учебных целей.
Перемещение образца осуществляется с помощью прецизионного сканера по трем ортогональным координатам (X, Y, Z).
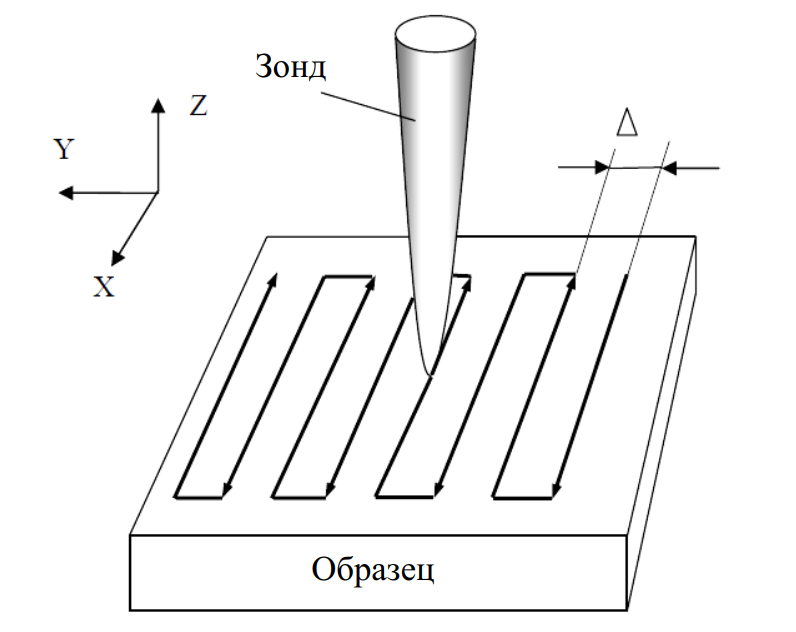
Рис. 1. Принцип растрового сканирования поверхности
Процесс сканирования происходит следующим образом: образец движется построчно в горизонтальной плоскости (XY). Это движение называется растровым сканированием.
- Быстрая ось (X): Сканер проходит строку слева направо.
- Медленная ось (Y): После завершения строки сканер смещается на шаг \( \Delta \) (шаг дискретизации) и начинает новую строку.
Таким образом покрывается вся заданная площадь образца. Точность позиционирования обеспечивается пьезокерамическими приводами, способными совершать перемещения с субнанометровой точностью.
3. Система автоматического слежения (Обратная связь)
В процессе сканирования зонд неизбежно оказывается над участками с различными физико-химическими свойствами и геометрическим рельефом. Если бы высота образца (координата Z) оставалась фиксированной, зонд мог бы врезаться в выступ или потерять контакт над впадиной.
Чтобы этого избежать, используется система автоматического регулирования (САР) с отрицательной обратной связью.
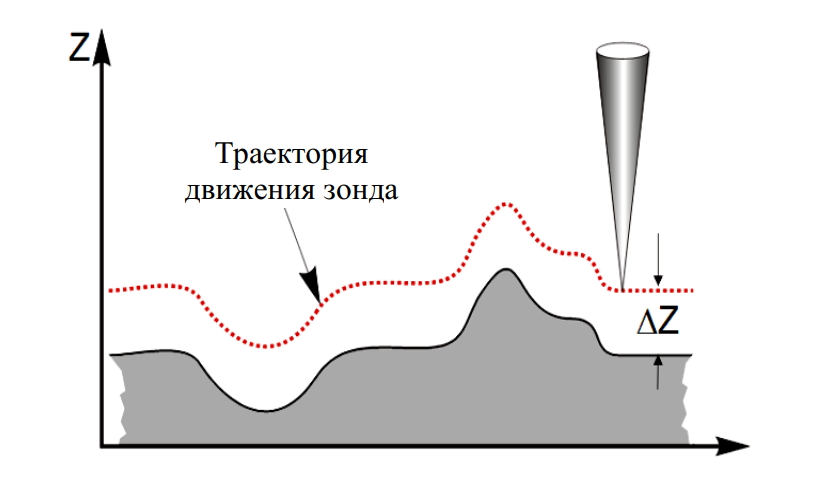
Рис. 2. Траектории движения зонда относительно образца при работе обратной связи
На рисунке 2 показана траектория относительного движения. Система работает по методу постоянного взаимодействия:
- Датчик регистрирует текущее значение взаимодействия (амплитуду колебаний или туннельный ток).
- Система сравнивает текущее значение с заданным (SetPoint).
- Если взаимодействие ослабевает (впадина), система подает сигнал на пьезосканер, чтобы приподнять образец.
- Если взаимодействие усиливается (выступ), образец опускается.
Таким образом, поддерживается постоянное расстояние \( \Delta Z \). Траектория движения образца по оси Z фактически повторяет рельеф поверхности.
4. Конструкция измерительной головки
Сердцем прибора является измерительная головка. Она объединяет в себе механические узлы подвода, сканирования и детектирования сигнала. Рассмотрим её устройство детально, опираясь на схему.
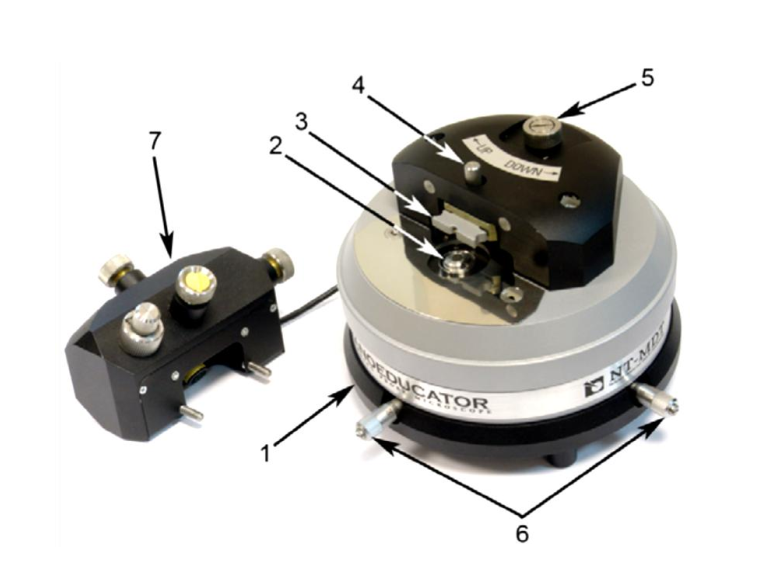
Рис. 3. Внешний вид измерительной головки СЗМ NanoEducator
Внешний вид и компоновка элементов представлены на рис. 3. Ниже приведено описание взаимодействия узлов, сохраняющее логику оригинальной схемы:
- Основание (1): Жесткая база, на которой монтируются все подвижные части. Виброустойчивость основания критически важна для измерений.
- Сканер с держателем образца (обозначен как 8 и 7 в тексте, на рис. поз. 2 и 6): На основании 1 установлен сканер. В тексте оригинала упоминается, что сканер оснащен винтами перемещения (9, 10 — условные обозначения механизмов позиционирования) для выбора области сканирования. На самом рисунке 3 мы видим держатель образца под позицией 2 и винты перемещения под позицией 6.
- Датчик взаимодействия (3): Узел, содержащий зонд. Он фиксируется винтом 4.
- Механизм подвода: Для начала работы необходимо сблизить зонд и образец. Грубый подвод зонда, закрепленного на датчике 3, осуществляется с помощью винта ручного подвода 5. Также в конструкции предусмотрен моторизированный подвод на базе шагового двигателя (поз. 2 в текстовом описании механики подвода).
- Защитная крышка с видеокамерой (7): Видеокамера необходима для визуального контроля процесса сближения и выбора места на образце, так как зонд слишком мал для наблюдения невооруженным глазом.
Такая компоновка позволяет легко менять образцы и зонды, что идеально подходит для учебного процесса.
5. Устройство зондового датчика
В NanoEducator используется уникальный для СЗМ датчик — пьезоэлектрический трубчатый кантилевер (в отличие от кремниевых балок в промышленных АСМ). Это делает датчик дешевым и ремонтопригодным.
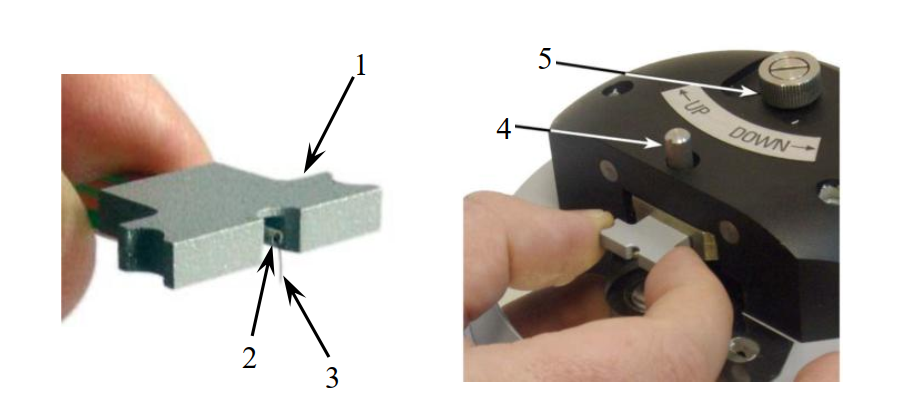
Рис. 4. Конструкция зондового датчика взаимодействия
Согласно рис. 4, датчик состоит из:
- Основание (1): Служит для крепления всей конструкции.
- Пьезоэлектрическая трубка (2): Консоль длиной \( l = 7 \) мм, диаметром \( d = 1,2 \) мм и толщиной стенки \( h = 0,25 \) мм. Трубка изготовлена из пьезокерамики, которая способна деформироваться под действием электрического поля и наоборот — генерировать заряд при деформации.
- Игольчатый зонд (3): Вольфрамовая проволока диаметром 0,1 мм. Её кончик затачивается электрохимическим травлением до радиуса кривизны менее 50 нм.
Схема электродов: На внутреннюю поверхность трубки нанесен сплошной электрод (земля). На внешней поверхности расположены два раздельных полуцилиндрических электрода. Один работает как возбудитель колебаний (обратный пьезоэффект), второй — как детектор колебаний (прямой пьезоэффект).
6. Принцип резонансного детектирования
Работа микроскопа в «полуконтактном» или «гибридном» режиме основана на резонансе.
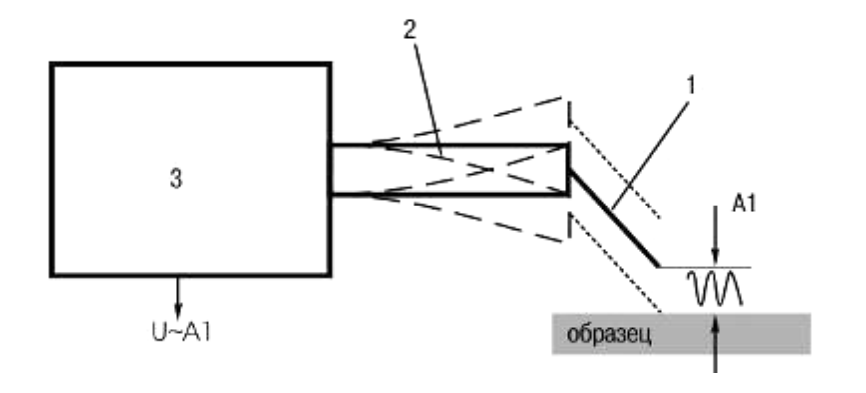
Рис. 5. Принцип регистрации силового взаимодействия
К одной обкладке пьезовибратора (см. поз. 2 на рис. 5) подводится переменное напряжение с частотой \( f \), близкой к собственной резонансной частоте \( f_0 \) системы.
где \( k \) — жесткость кантилевера, \( m_{eff} \) — эффективная масса.
Кантилевер начинает колебаться с амплитудой \( A \). При приближении к поверхности на зонд начинают действовать диссипативные силы (вязкое трение воздуха в зазоре, взаимодействие с поверхностными слоями).
В результате взаимодействия (см. рис. 5) происходит следующее:
- Зонд касается образца в нижней точке колебания.
- Энергия колебаний расходуется на взаимодействие.
- Амплитуда уменьшается на величину \( \Delta A = A_{free} — A_{work} \).
- Также происходит сдвиг фазы колебаний.
Изменение амплитуды регистрируется второй обкладкой пьезотрубки и передается в систему обратной связи.
7. Формирование и цифровая обработка изображений
СЗМ не «видит» поверхность в оптическом смысле. Он «строит» изображение на основе математической матрицы данных.
Оцифровка сигнала
Сигнал с датчика (амплитуда, фаза или ток) и сигналы управления сканером (напряжение на Z-электродах) поступают на Аналого-Цифровой Преобразователь (АЦП). Непрерывный сигнал превращается в дискретный набор чисел — матрицу.
Каждый элемент матрицы \( M_{ij} \) соответствует точке на поверхности с координатами:
где \( i, j \) — индексы строки и столбца, а \( x_0, y_0 \) — шаг сканирования. Значение элемента матрицы — это высота \( Z \) или другая физическая величина (сила тока, фазовый сдвиг).
Визуализация (2D и 3D)
Для восприятия человеком матрица чисел преобразуется в графику.
- 2D-визуализация (Карта высот): Каждому значению \( Z \) присваивается цвет из выбранной палитры (обычно 256 цветов). Низкие точки могут быть окрашены в черный/синий, высокие — в желтый/белый. Это напоминает топографическую карту местности.
- 3D-визуализация: Строится аксонометрическая проекция поверхности \( Z = f(x, y) \). Для усиления восприятия объема применяется алгоритм виртуального освещения: рассчитывается падение лучей от виртуального источника света, создавая тени и блики на «склонах» микрорельефа.
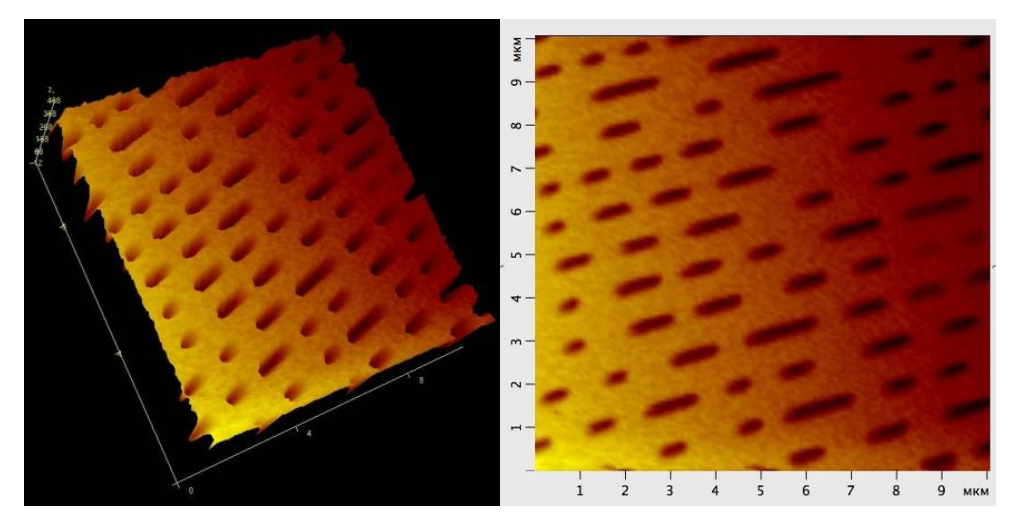
Рис. 6. Примеры визуализации: 3D-модель (слева) и 2D-топограмма (справа) поверхности CD-диска
Современное ПО позволяет вращать, масштабировать 3D-модели и проводить измерения шероховатости, высоты ступенек и размеров зерен.
8. Электрические средства измерения линейных размеров
В основе работы любого СЗМ, включая NanoEducator, лежат прецизионные измерения малых перемещений. Этот раздел расширяет понимание того, как физическое смещение превращается в электрический сигнал.
Первичный измерительный преобразователь (сенсор) — это устройство, которое первым воспринимает измеряемую величину (размер, перемещение) и преобразует её в сигнал (ток, напряжение, емкость), удобный для обработки.
В технике линейных измерений выделяют следующие основные типы датчиков, применяемые в том числе в метрологии нанодиапазона:
- Резистивные: Основаны на изменении сопротивления (тензодатчики). Используются редко в СЗМ из-за шумов, но часто в весах.
- Емкостные: Основаны на изменении емкости конденсатора при изменении зазора между обкладками. \( C = \varepsilon_0 \varepsilon S / d \). Очень точные, используются в дорогих АСМ для контроля положения сканера.
- Индуктивные: Используют изменение индуктивности катушки при перемещении сердечника.
- Пьезоэлектрические (как в NanoEducator): Генерируют заряд при деформации кристаллической решетки.
В NanoEducator пьезоэффект используется двояко: и как актуатор (для движения), и как сенсор (для считывания колебаний).
9. Сравнительная таблица методов микроскопии
| Характеристика | Оптическая микроскопия | Сканирующая электронная (SEM) | Зондовая микроскопия (АСМ/NanoEducator) |
|---|---|---|---|
| Разрешение | ~200 нм (дифракционный предел) | ~1-5 нм | ~0.1 нм (атомное) |
| Среда | Воздух, жидкость | Высокий вакуум | Воздух, жидкость, вакуум |
| Тип изображения | 2D (плоское) | Псевдо-3D (тени) | Истинное 3D (профиль высот) |
| Подготовка образца | Простая | Сложная (напыление металла) | Простая (для АСМ), сложная для СТМ |
| Стоимость | Низкая | Очень высокая | Средняя / Высокая |
10. Преимущества и недостатки NanoEducator
Преимущества:
- Открытая архитектура: Позволяет студентам видеть все элементы конструкции, что важно для обучения.
- Простота расходных материалов: Возможность самостоятельного изготовления зондов из проволоки (травление), что экономит бюджет по сравнению с дорогими кремниевыми кантилеверами.
- Компактность: Прибор занимает мало места и устойчив к внешним вибрациям.
Недостатки:
- Ограниченная скорость: Сканирование занимает время (от минут до десятков минут).
- Артефакты иглы: Если игла затупилась или загрязнилась, форма объектов на изображении будет искажена (эффект свертки).
- Ограниченная область сканирования: Обычно не более 50-70 мкм, что мало для макро-объектов.
11. Интересные факты о зондовой микроскопии
- Атомы IBM: В 1989 году ученые IBM с помощью СЗМ выложили логотип компании из 35 атомов ксенона. Это стало первой в истории манипуляцией отдельными атомами.
- Звук атомов: Сигнал с АСМ можно преобразовать в звук. Так как частоты колебаний кантилеверов (10-300 кГц) близки к ультразвуку, их можно понизить и «услышать» поверхность.
- Весы для вируса: СЗМ может использоваться как сверхчувствительные весы, способные взвесить одну молекулу или вирус (фемтограммы).
- Слепые зоны: Зонд не может заглянуть под «козырек» на поверхности (отрицательный угол уклона), так как он сканирует только сверху.
- Игла острее бритвы: Радиус кривизны хорошего зонда составляет 10 нанометров. Это в тысячи раз острее самой лучшей хирургической стали.
- Дрейф: При изменении температуры в комнате на 1 градус, тепловое расширение металла микроскопа может сместить образец на сотни нанометров, испортив картинку.
- Биология: АСМ может работать в жидкости, что позволяет изучать живые клетки и бактерии без их высушивания и убийства.
12. Часто задаваемые вопросы (FAQ)
1. Можно ли увидеть атомы на NanoEducator?В режиме СТМ (сканирующего туннельного микроскопа) при использовании качественного зонда и образца графита (HOPG) можно получить атомное разрешение кристаллической решетки.
2. Почему изображение иногда выглядит «размытым» или двоится?Чаще всего это связано с качеством зонда. Если на кончике иглы образовалась «двойная вершина» (грязь или дефект травления), каждый объект на поверхности будет отрисовываться дважды (артефакт).
3. Как долго длится одно сканирование?Это зависит от выбранного разрешения и скорости. Обычный кадр 256×256 точек занимает от 3 до 10 минут. Спешить нельзя, иначе возникнет «звон» на изображении из-за инерции сканера.
4. Что такое PID-регулятор в настройках программы?Это настройки обратной связи (Proportional-Integral-Derivative). Они определяют, как быстро и точно система реагирует на изменение рельефа. Неправильная настройка ведет либо к смазыванию рельефа, либо к возбуждению паразитных колебаний (шуму).
5. Опасен ли прибор для человека?Нет. NanoEducator использует низкие напряжения (безопасные для человека) и не генерирует ионизирующего излучения, в отличие от электронных микроскопов.
Заключение
Сканирующий зондовый микроскоп NanoEducator представляет собой уникальный сплав прецизионной механики, аналоговой электроники и цифровых алгоритмов обработки данных. Рассмотренные принципы работы — от пьезоэффекта и резонанса до растрового сканирования — являются универсальными для всей отрасли нанотехнологий.
Понимание того, как физическое взаимодействие зонда с поверхностью превращается в цифровой 3D-образ, является ключевой компетенцией для современного инженера или исследователя. Несмотря на свою учебную направленность, прибор позволяет решать реальные исследовательские задачи, демонстрируя, что наномир стал доступен для изучения не только в закрытых лабораториях, но и в студенческих аудиториях.
Нормативная база
-
- ГОСТ Р 8.593-2009 «ГСИ. Микроскопы атомно-силовые сканирующие. Методика поверки».
- ГОСТ Р 8.631-2007 «ГСИ. Микроскопы электронные растровые измерительные. Методика поверки».
Список рекомендуемой литературы
- Миронов В. Л. «Основы сканирующей зондовой микроскопии». Учебное пособие для студентов старших курсов ВУЗов. — Н. Новгород: ИФМ РАН, 2004. — 114 с. (Классическое пособие для изучения физических основ СЗМ).
- Быков В. А. «Микромеханика для сканирующей зондовой микроскопии и нанотехнологии». — М.: Техносфера, 2018. — 264 с. (Глубокий разбор механических узлов и датчиков, используемых в приборах типа NanoEducator).
- Неволин В. К. «Основы туннельно-зондовой нанотехнологии». Учебное пособие. — М.: МИЭТ, 2009. (Полезно для понимания туннельного режима работы микроскопа).

Профилометрия — это раздел метрологии, посвященный количественному измерению и качественному анализу микрогеометрии поверхности. Любая деталь, какой бы гладкой Читать далее...
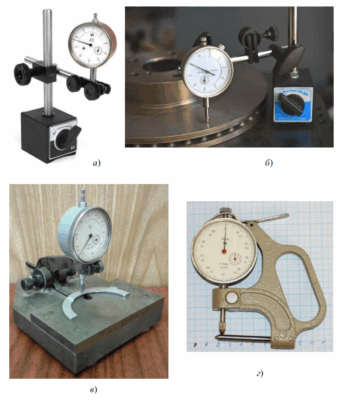
Индикатор часового типа (ИЧ) — это высокоточный измерительный прибор, предназначенный для определения малых линейных отклонений размеров детали, проверки Читать далее...
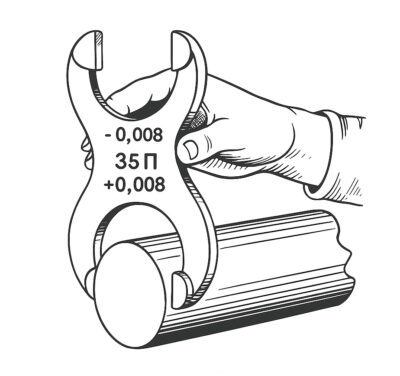
Калибры — это бесшкальные измерительные инструменты, предназначенные для контроля размеров, формы и взаимного расположения поверхностей деталей. Они не Читать далее...

Акселерометр — это прибор, измеряющий проекцию кажущегося ускорения (разность между истинным ускорением объекта и гравитационным ускорением). Простыми словами, Читать далее...