Содержание страницы
- Физические основы и математическая модель
- Сферы применения доплеровской радиолокации
- Устройство и схемотехника полицейского ГИБДД радара
- Рабочие диапазоны и типы радаров
- Точность измерений и погрешности
- Таблица сравнения технологий контроля скорости
- Интересные факты о радарах
- FAQ: Часто задаваемые вопросы
- Заключение
Доплеровский радар — это высокотехнологичное радиолокационное устройство, предназначенное для бесконтактного измерения скорости движущихся объектов. В основе его работы лежит фундаментальный физический принцип — эффект Доплера. Этот прибор не просто фиксирует наличие объекта, но и с высокой точностью определяет радиальную составляющую его вектора скорости, анализируя изменения параметров отраженного сигнала.
Историческая справка: Сам эффект был теоретически предсказан австрийским физиком Кристианом Доплером еще в 1842 году. Однако его практическое применение в радиолокации началось гораздо позже, в эпоху Второй мировой войны, когда возникла острая необходимость селекции движущихся воздушных целей на фоне пассивных помех. Первый специализированный полицейский радар для контроля дорожного движения был представлен в 1954 году компанией Decatur Electronics (США), что навсегда изменило методы обеспечения безопасности на дорогах.
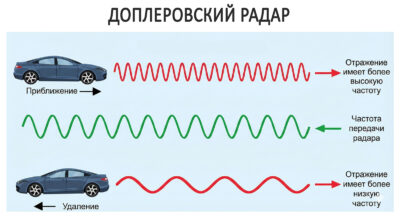
Рис. 1. Принцип действия Доплеровского радара
Физические основы и математическая модель
Радар является специализированным измерительным комплексом, генерирующим когерентное электромагнитное излучение. Когда радар излучает радиоволну известной частоты (обычно в сантиметровом или миллиметровом диапазоне), она распространяется в пространстве до встречи с препятствием. При контакте с движущимся автомобилем происходит переизлучение энергии — сигнал отражается и возвращается обратно к источнику.
Ключевой момент заключается в трансформации частотных характеристик:
- Если объект приближается, отраженные гребни волн приходят чаще, и частота сигнала повышается.
- Если объект удаляется, частота отраженного сигнала понижается.
Расчет частотного сдвига
Математическая зависимость частоты отраженного сигнала от скорости объекта описывается следующим уравнением. Пусть \( f_0 \) — исходная частота излучения, а \( f \) — частота принятого сигнала. В общем случае (с учетом релятивистских поправок, которыми при скоростях автомобилей можно пренебречь) связь выглядит так:
Разность частот, называемая доплеровским сдвигом (\( f_d \)), определяется формулой:
где:
- \( f_0 \) — частота волны исходного сигнала излучаемого радаром;
- \( f \) — частота сигнала, отраженного от объекта;
- \( v \) — скорость объекта измерения относительно радара (приемника);
- \( c \) — скорость света в вакууме (\( \approx 3 \cdot 10^8 \) м/с);
- \( \theta \) — угол между направлением луча радара и вектором скорости автомобиля (в системе отсчёта приёмника).
Фазовый метод измерения
Современные приборы часто используют не прямое измерение частоты, а анализ фазовых характеристик, особенно когда речь идет о малых скоростях или необходимости сверхбыстрого измерения. Учитывая, что при скоростях движения наземного транспорта (до 250 км/ч) изменение частоты крайне незначительно по сравнению с несущей частотой (порядка десятков гигагерц), измерение сдвига фазы дает высокую точность.
Сдвиг фазы \( \Delta \varphi \) за определенный интервал времени \( \Delta t \) выражается формулой:
где \( \lambda \) — длина волны излучаемого сигнала (\( \lambda = c / f_0 \)), \( v \) — искомая скорость, а \( \Delta t \) — время между выборками (или между двумя импульсами).
Из этого уравнения можно выразить скорость движущегося объекта:
Этот метод позволяет процессору радара вычислять скорость практически мгновенно, анализируя I/Q компоненты сигнала.
Сферы применения доплеровской радиолокации
Хотя мы привыкли ассоциировать радары с полицией, спектр их применения огромен. Технология критически важна для:
- Авиации и космонавтики: определение путевой скорости и угла сноса летательных аппаратов.
- Метеорологии: профилирование ветра, обнаружение облаков, торнадо и гидрометеоров (доплеровские метеорадары видят не только тучу, но и то, вращается ли она).
- Навигации: измерение скорости морских и речных судов, контроль течений.
- Медицины: ультразвуковая доплерография для измерения скорости кровотока.
- Охранных систем: датчики движения в помещениях.
Однако наиболее массовым сегментом остаются переносные и стационарные радарные приборы для контроля безопасности дорожного движения (ГИБДД).
Устройство и схемотехника полицейского ГИБДД радара
Полицейский радар представляет собой сложный радиоэлектронный комплекс, совмещающий функции передатчика и высокочувствительного приемника. Современные устройства — это моноблочные системы, где антенный блок интегрирован с модулем цифровой обработки сигналов (DSP).
Процесс измерения выглядит так: генератор (обычно на диоде Ганна или синтезаторе частоты) создает СВЧ-колебания. Антенна фокусирует их в узкий луч. Принятый сигнал смешивается с опорным, выделяется разностная частота, которая затем оцифровывается и обрабатывается процессором с помощью алгоритма БПФ (Быстрое Преобразование Фурье).

Рис. 2. Общий вид радаров ГИБДД (ручные и стационарные комплексы). На рисунке показаны типичные корпуса: ручной «пистолетного» типа с рукояткой и дисплеем, а также стационарный блок для крепления на фермах.
Структурная схема радара позволяет понять путь прохождения сигнала. Она включает в себя задающий генератор, антенный переключатель (циркулятор), смеситель частот, усилитель низкой частоты и вычислительный блок.
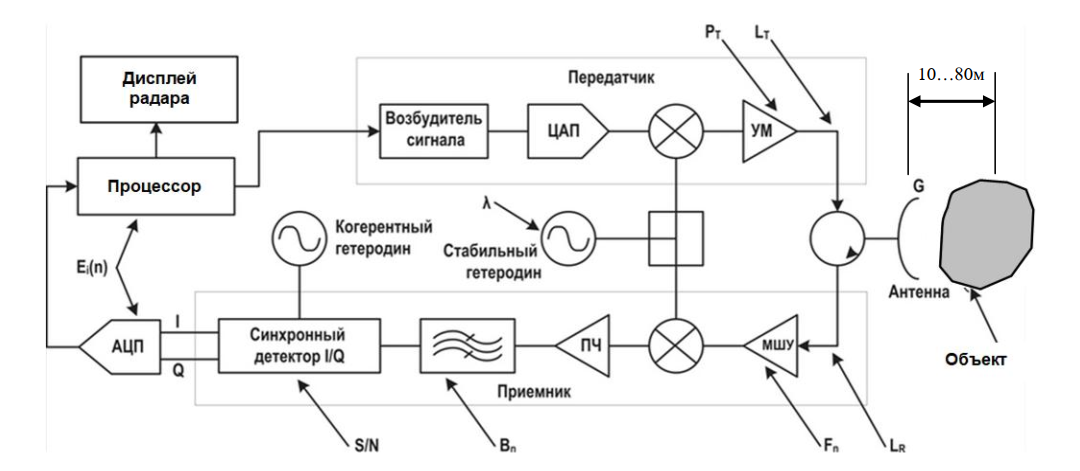
Рис. 3. Структурная схема радара. Основные узлы: 1 — антенный блок (излучатель/приемник), 2 — СВЧ-генератор, 3 — смеситель, 4 — усилитель доплеровского сигнала, 5 — процессор цифровой обработки (DSP), 6 — блок индикации и управления.
Пояснение к схеме (Рис. 3): Сигнал от генератора (2) поступает в антенну (1) и излучается в пространство. Отраженный сигнал принимается той же антенной (1) и направляется в смеситель (3), где происходит сравнение с исходной частотой. Выделенный сигнал разностной частоты усиливается в блоке (4) и поступает в цифровой процессор (5), который по алгоритмам, описанным выше, рассчитывает скорость и выводит её на дисплей (6).
Рабочие диапазоны и типы радаров
Большинство современных радаров в РФ и мире работают в диапазоне K (24.15 ГГц). Это оптимальный компромисс между размером антенны (чем выше частота, тем компактнее антенна) и дальностью действия (чем ниже частота, тем меньше затухание в атмосфере).
Отраженный от движущегося предмета сигнал имеет измененную частоту. Для диапазона K при скорости 100 км/ч доплеровский сдвиг составляет всего несколько килогерц, что требует прецизионной электроники. В таблице ниже приведены характеристики используемых диапазонов.
Таблица 1. Типы и диапазоны радаров ГИБДД (расширенная)
| Диапазон | Несущая частота | Длина волны (см) | Примеры моделей (РФ и мир) | Особенности |
|---|---|---|---|---|
| X | 10,525 ГГц ±100 МГц | ~2.85 | Барьер-2М, Сокол-М | Устаревший диапазон. Большие антенны, подвержен помехам, но высокая дальность. Сейчас используется редко. |
| Ku | 13,45 ГГц ±125 МГц | ~2.23 | Редкие модели в Европе | В России практически не применяется, совпадает с частотами спутникового ТВ. |
| K | 24,125 ГГц ±175 МГц | ~1.24 | Арена, Беркут, Бинар, Визир, Искра-1, Кордон, Кречет, Крис-С/П, Места 2200, Радис, Рапира-1, Робот, Стрелка-СТ | Основной мировой стандарт. Оптимальный баланс компактности и эффективности. Высокая скорость реакции. |
| Ka | 34,3 ГГц / 34,7 ГГц | ~0.87 | Multanova (Европа), Stalker (США) | Сверхкороткая дальность обнаружения радар-детекторами («стелс»-режим), высокая точность, но дороговизна компонентов. |
| LASER (Lidar) | 800-1100 нм (ИК) | микроны | Амата, ЛИСД-2М/-2Ф, Полискан | Использует не радиоволны, а лазерные импульсы. Измеряет время пролета света (TOF). Сверхточечное наведение. |
Точность измерений и погрешности
Вопрос точности является юридически значимым при вынесении штрафов. Производители современных комплексов достигли впечатляющих результатов. Погрешность радаров типа СТРЕЛКА, согласно паспортным данным, не превышает 1 км/ч (до скоростей 100 км/ч) и 2 км/ч на сверхвысоких скоростях. Аналогичные показатели у комплекса КРИС-П — 1 км/ч. Более старые модели допускали погрешность до 2 км/ч.
Эффект косинуса (Геометрическая погрешность)
Самая значимая системная ошибка связана с углом установки радара \( \theta \). Радар измеряет только радиальную скорость (проекцию скорости на луч зрения).
Если радар стоит сбоку от дороги (а он всегда стоит сбоку), угол \( \theta > 0 \). Реальная скорость \( v_{real} \) связана с измеренной \( v_{meas} \) так:
\( v_{meas} = v_{real} \cdot \cos \theta \).
Так как косинус угла всегда меньше или равен 1, измеренная скорость всегда меньше или равна реальной.
- При движении на повороте или холмистой местности эта погрешность увеличивается (скорость занижается еще сильнее).
- Если движение происходит по прямой без перепадов высот, радар регистрирует скорость, максимально близкую к реальной.
- Парадокс настройки: В ПО радаров иногда вносится программная компенсация среднего угла установки. Если радар установлен под углом меньше расчетного, он может теоретически завысить скорость, но на практике приборы сертифицируются так, чтобы погрешность всегда трактовалась в пользу водителя (до +1..+2 км/ч запаса).
Внешние факторы и помехи
На работу радара влияют различные факторы окружающей среды:
- Многолучевое распространение (Multipath): Радиолуч может отражаться не только от автомобиля, но и от асфальта, металлических отбойников, зданий. Это может вызвать кратковременные скачки показаний.
- Погодные условия: Плотный дождь, снег или туман создают распределенные отражения (клаттер), что снижает дальность действия радара, но обычно не влияет на точность измерения скорости (благодаря фильтрации).
- Вибрация: Если сам патрульный автомобиль с радаром движется или вибрирует (например, от работы вентилятора), это может создать ложный доплеровский сдвиг.
Таблица сравнения технологий контроля скорости
| Характеристика | Доплеровский радар (K-band) | Лазерный лидар (Lidar) | Видеоаналитика (Автодория) |
|---|---|---|---|
| Принцип действия | СВЧ радиоволны (эффект Доплера) | ИК лазерные импульсы (время пролета) | Математический расчет по кадрам (S = v*t) |
| Ширина луча | Широкий (захват нескольких полос) | Точечный (выбор конкретной машины) | Зависит от оптики камеры |
| Работа в непогоду | Отлично (проходит сквозь туман/дождь) | Плохо (луч рассеивается) | Средне (зависит от видимости) |
| Обнаружение радар-детектором | Возможно заранее (за 500-1000м) | Сложно (только по факту облучения) | Невозможно (нет излучения) |
| Стоимость комплекса | Средняя | Высокая | Зависит от ПО и камер |
Интересные факты о радарах
- Летучие мыши были первыми «пользователями» эффекта Доплера. Они используют биосонар, анализируя доплеровский сдвиг эха от крыльев насекомых, чтобы определить, куда летит добыча.
- Эффект вентилятора: Радар может ошибочно измерить скорость лопастей вентилятора кондиционера в стоящем автомобиле, если луч попадет прямо на радиаторную решетку.
- Золотой стандарт: Частота 24.125 ГГц выбрана не случайно — это частота поглощения водяными парами (слабая линия), что ограничивает дальность действия радаров, позволяя использовать одну и ту же частоту в разных районах города без взаимных помех.
- Призрак: Существует явление «shadowing», когда большой грузовик закрывает собой маленькую машину, и радар приписывает скорость легковушки грузовику.
- Космос: Доплеровские радары используются для посадки марсоходов, измеряя скорость снижения с точностью до сантиметров в секунду.
- Стелс-технологии: Угловатая форма самолетов Stealth (F-117) призвана отражать радиоволны радаров не обратно к источнику, а в стороны, делая самолет «невидимым».
- Мгновенная карма: Современные радары «Стрелка» ведут цель за 300-500 метров, но фотофиксацию делают только вблизи (50 метров). Тормозить перед самой камерой бесполезно — ваша скорость уже записана в базу данных секундами ранее.
FAQ: Часто задаваемые вопросы
Заключение
Радары, основанные на эффекте Доплера, прошли долгий путь эволюции от громоздких экспериментальных установок до компактных интеллектуальных систем, интегрированных в городскую инфраструктуру («Умный город»). Несмотря на развитие альтернативных методов (лазеры, оптический анализ), радиолокация остается самым надежным и всепогодным инструментом контроля скорости. Понимание физики процесса позволяет водителям более ответственно относиться к соблюдению скоростного режима, а специалистам — совершенствовать методы обеспечения безопасности на дорогах.
Нормативная база
- ГОСТ Р 57144-2016 — Специальные технические средства, работающие в автоматическом режиме и имеющие функции фото- и киносъемки, видеозаписи, для обеспечения контроля за дорожным движением.
- OIML R 91 — Международная рекомендация. Радарное оборудование для измерения скорости транспортных средств.
Список литературы
- Сколник М. Справочник по радиолокации. — М.: Техносфера, 2014. — Т. 1, 2.
- Финкельштейн М. И. Основы радиолокации: Учебник для вузов. — М.: Радио и связь, 1983.
- Бакулев П. А. Радиолокационные системы. Учебник. — М.: Радиотехника, 2007.
- Материалы технической документации к комплексам «Стрелка-СТ» и «Крис-П».

Профилометрия — это раздел метрологии, посвященный количественному измерению и качественному анализу микрогеометрии поверхности. Любая деталь, какой бы гладкой Читать далее...
Пирометрия (от греч. pyr — огонь и metreo — измеряю) — это совокупность методов и средств измерения температуры Читать далее...

Термопара — это самый распространенный в мире датчик для измерения температуры, представляющий собой два разнородных проводника, соединенных в Читать далее...

Что делать, когда обычный ртутный градусник или стандартная термопара не справляются? Как измерить температуру внутри ядерного реактора, с Читать далее...