Содержание страницы
- 1. Основные теоретические положения и устройство силовой части
- 2. Принципы частотного управления асинхронным двигателем (АД)
- 3. Особенности скалярного управления
- 4. Векторное управление: Математика вместо грубой силы
- 5. Построение цифровой системы управления
- 6. Сравнение Скалярного и Векторного режимов
- 7. FAQ: Часто задаваемые вопросы
- 8. Интересные факты о частотном регулировании
- 9. Типичные ошибки при эксплуатации ПЧ
- Заключение
Преобразователь частоты (ПЧ, англ. VFD — Variable Frequency Drive) — это электронное устройство для управления скоростью вращения и моментом электродвигателей переменного тока путем изменения частоты и напряжения питания.
1. Основные теоретические положения и устройство силовой части
Основным элементом современных автоматизированных электроприводов переменного тока является полупроводниковый преобразователь частоты (ПЧ). Несмотря на кажущееся многообразие брендов и моделей на рынке, фундаментальная схемотехника и алгоритмы управления у большинства производителей (Siemens, ABB, Danfoss, Schneider Electric и др.) базируются на схожих типовых решениях.

1.1. Архитектура преобразователя с промежуточным звеном постоянного тока
Наибольшее распространение в промышленности получили преобразователи частоты с явно выраженным промежуточным звеном постоянного тока. Они строятся по классической двухступенчатой схеме: выпрямитель — звено постоянного тока — автономный инвертор. Такая топология («AC-DC-AC») позволяет полностью развязать выходные параметры (частоту и амплитуду) от входных параметров питающей сети.
Базовыми элементами данного типа асинхронного частотно-регулируемого электропривода являются:
- Управляемый или неуправляемый преобразователь частоты (ПЧ, обозначен как UZF) — центральный узел, получающий питание от промышленной трехфазной сети.
- Асинхронный двигатель (АД, обозначен как М) — исполнительный механизм, преобразующий электрическую энергию в механическую.
Рассмотрим подробную схему подключения и состав силовой части, представленную на рисунке 1.
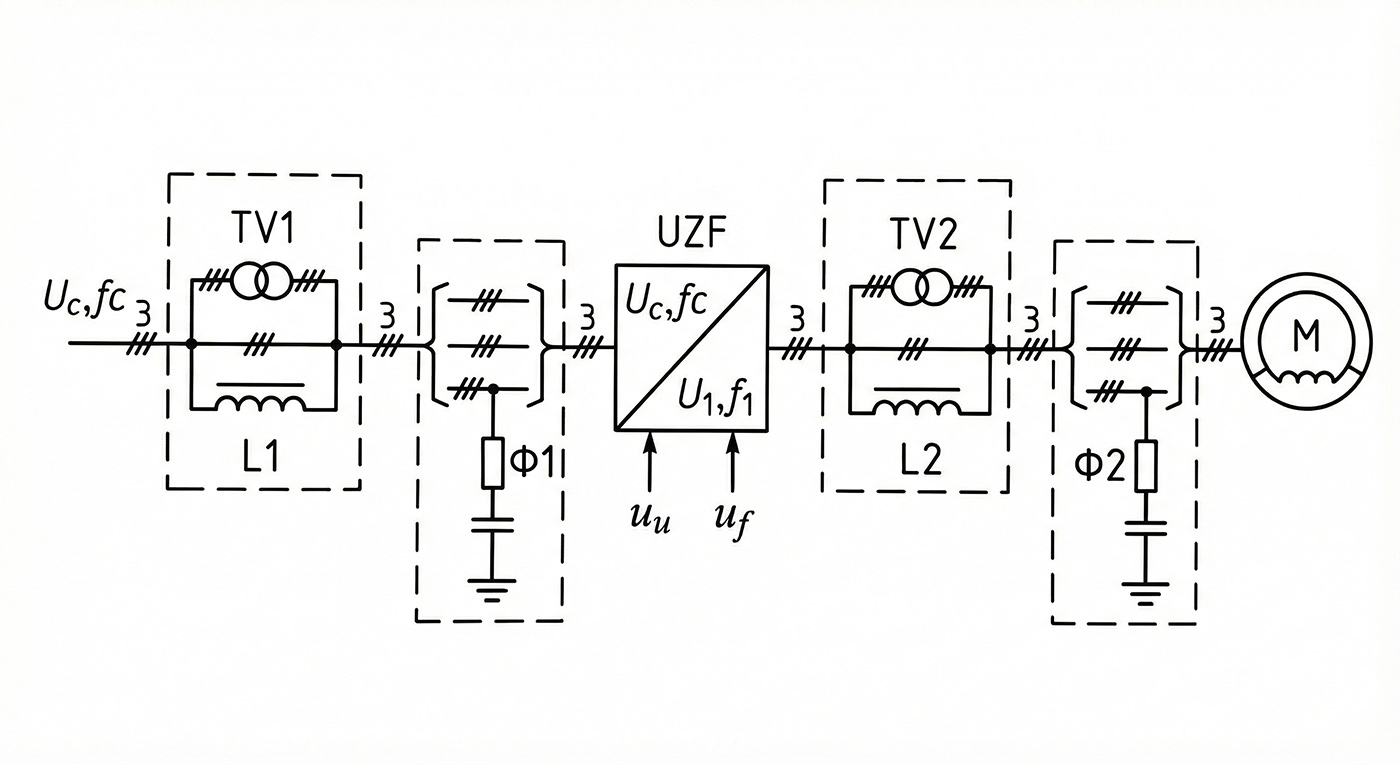
В соответствии с рисунком 1, система работает следующим образом: ПЧ (UZF) питается от сети напряжением \(U_c\) и частотой \(f_c\) (обычно 50 Гц). Выход ПЧ подключен к двигателю М. Однако для обеспечения надежности и электромагнитной совместимости (ЭМС) в схему вводятся дополнительные элементы:
- Согласующий трансформатор TV1: Устанавливается на входе при необходимости согласования уровня напряжения сети с номинальным напряжением ПЧ (например, сеть 6 кВ, а ПЧ 0.4 кВ или 690 В). Также он выполняет функцию гальванической развязки.
- Входные реакторы (дроссели) L1: Это критически важный элемент. Они ограничивают токи короткого замыкания (увеличивая импеданс сети) и, что еще важнее, подавляют высокочастотные гармоники тока, генерируемые выпрямителем ПЧ, защищая сеть от «загрязнения» и перенапряжений.
- Сетевые фильтры Ф1 (RFI/EMC фильтры): Представляют собой RC-цепи или LC-звенья. Их задача — подавление высокочастотных электромагнитных помех, излучаемых преобразователем в питающую сеть.
- Выходной трансформатор TV2: Используется в специальных случаях, например, в высоковольтных приводах, реализованных по двухтрансформаторной схеме, для согласования низковольтного выхода ПЧ с высоковольтным двигателем.
- Моторные дроссели L2 и фильтры Ф2 (dU/dt или синус-фильтры): Устанавливаются на выходе ПЧ при значительном удалении двигателя.
Важно: При длине кабеля более 50 м (а для некоторых современных моделей — более 100-200 м) возникает эффект «отраженной волны». Из-за несовпадения волнового сопротивления кабеля и двигателя, импульсы напряжения на клеммах мотора могут удваиваться, пробивая изоляцию обмоток. Фильтрующие дроссели L2 сглаживают крутизну фронтов импульсов, а помехоподавляющие RC-фильтры Ф2 гасят резонансные явления.
Выходные параметры системы — частота \(f_1\) и фазное напряжение \(U_1\) (или ток \(I_1\)) — формируются по сигналам управления \(u_f\) и \(u_u\). Именно регулирование \(f_1\) и \(U_1\) позволяет управлять основными координатами АД: током статора, электромагнитным моментом \(M\) и угловой скоростью вала \(\omega\).
1.2. Классификация полупроводниковых преобразователей
Среди всего многообразия схем, наибольшее распространение получили две группы управляемых преобразователей:
- ПЧ со звеном постоянного тока: Используют двойное преобразование энергии. В качестве выходного каскада используется автономный инвертор (АИ). В зависимости от типа накопителя энергии в промежуточном звене (конденсатор или дроссель) они делятся на:
- Автономные инверторы напряжения (АИН) — наиболее массовый тип.
- Автономные инверторы тока (АИТ) — используются в мощных приводах (мегаваттного класса).
- Преобразователи с непосредственной связью (ПЧНС): Или циклоконверторы. В них отсутствует звено постоянного тока, а выходная частота формируется путем «вырезания» участков синусоиды входного напряжения. Могут быть с естественной коммутацией или с ШИМ. Их главный недостаток — ограничение максимальной выходной частоты (обычно не более 1/3 от сетевой).
1.3. Принцип работы преобразователя с АИН
Рассмотрим детально работу наиболее популярной системы ПЧ-АИН (Преобразователь Частоты — Автономный Инвертор Напряжения). Схема состоит из трех функциональных блоков (см. рисунок 2,а):
- Выпрямитель UZ1: Преобразует переменное напряжение сети в пульсирующее постоянное. Может быть диодным (неуправляемым) или тиристорным/транзисторным (управляемым, с возможностью рекуперации).
- Силовой фильтр Ф (звено постоянного тока): В схемах АИН это конденсатор \(C\) большой емкости. Он сглаживает пульсации напряжения после выпрямителя и служит буфером энергии. Для АИТ используется дроссель \(L\).
- Автономный инвертор UZ2: Преобразует постоянное напряжение обратно в переменное с заданными параметрами.
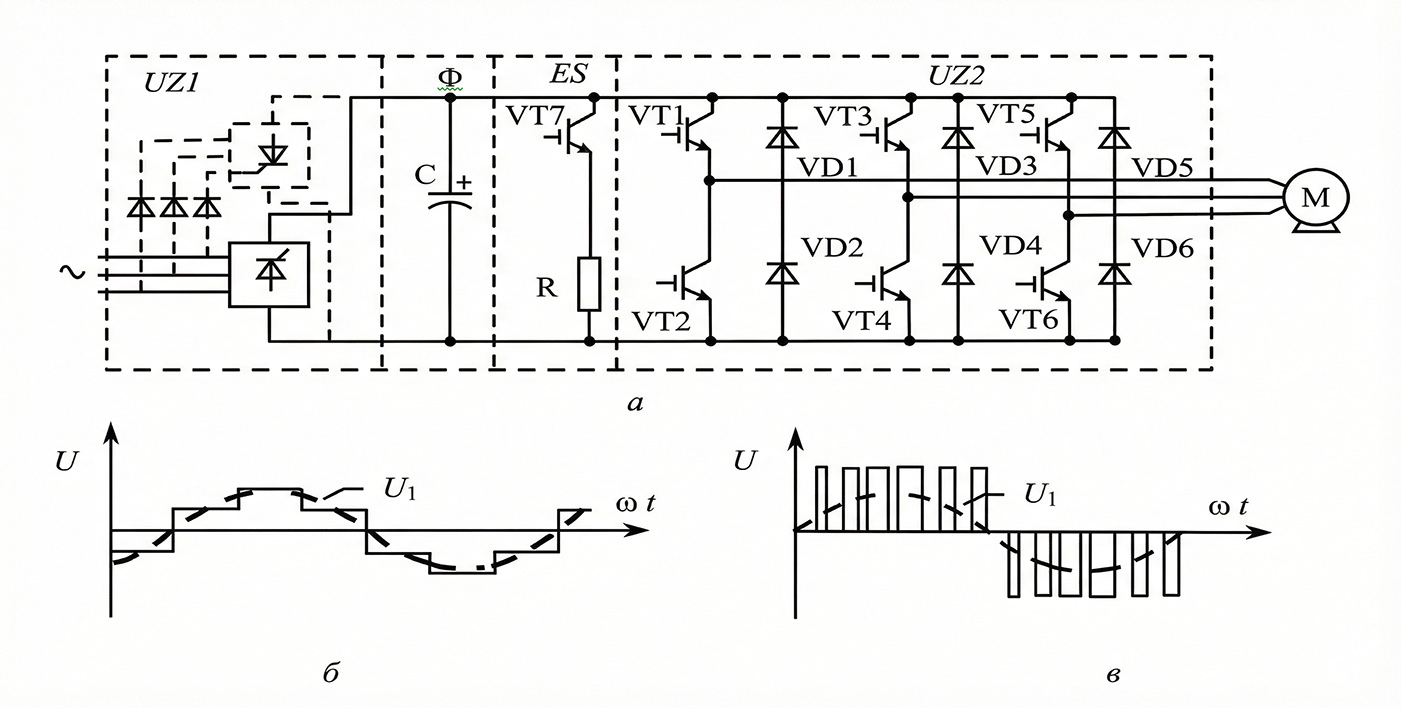
Современные АИ (рис. 2,а) выполняются на полностью управляемых ключах — IGBT-транзисторах (Insulated Gate Bipolar Transistor). Модуль IGBT содержит собственно транзистор (ключи VT1–VT6) и встречно-параллельный (шунтирующий) диод (VD1–VD6).
Роль обратных диодов VD1-VD6: Асинхронный двигатель является активно-индуктивной нагрузкой. Ток в индуктивности не может измениться мгновенно. Когда транзистор закрывается, ток обмотки должен куда-то течь. Диоды создают путь для протекания этого реактивного тока обратно в конденсатор фильтра \(C\), обеспечивая обмен реактивной энергией и защищая ключи от перенапряжения.
Методы формирования выходного напряжения:
Выходное напряжение автономного инвертора может регулироваться двумя основными способами:
- Амплитудно-импульсная модуляция (АИМ) (рис. 2,б): Используется управляемый выпрямитель UZ1, который меняет уровень постоянного напряжения в звене постоянного тока (амплитуду импульсов). Инвертор работает только как коммутатор фаз, формируя частоту. Способ устаревший.
- Широтно-импульсная модуляция (ШИМ) (рис. 2,в): Выпрямитель UZ1 неуправляемый (диодный), напряжение в звене постоянного тока максимально и стабильно. Регулирование напряжения на выходе происходит в самом инверторе за счет изменения ширины импульсов. Несущая частота (частота коммутации ключей, обычно 2–16 кГц) модулируется синусоидальным сигналом задания. Это основной метод в современных ПЧ.
Проблема рекуперации и тормозной чоппер
В стандартном ПЧ с диодным выпрямителем энергия может течь только от сети к двигателю. Однако, когда мы пытаемся быстро затормозить массивный механизм, двигатель переходит в генераторный режим. Кинетическая энергия механизма преобразуется в электрическую и через обратные диоды инвертора «закачивается» в конденсатор \(C\).
Так как диодный выпрямитель не пропускает ток обратно в сеть, напряжение на конденсаторе начинает опасно расти. Для защиты устанавливается тормозной модуль (чоппер): ключ VT7 и мощный резистор R. При превышении порога напряжения ключ VT7 открывается, и излишняя энергия рассеивается в тепло на резисторе R. Если требуется возврат энергии в сеть (экономия электричества), входной выпрямитель должен быть активным (управляемым) — на рис. 2,а такой вариант показан пунктиром.
1.4. Сравнительный анализ: Преимущества и недостатки системы ПЧ-АИН
| Преимущества | Недостатки |
|---|---|
| Широкий диапазон частот: Выходная частота от 0 до 600-1500 Гц (ограничена только скоростью ключей). Для сравнения, АИТ ограничен 100-125 Гц. | Двойное преобразование энергии: Снижает общий КПД системы (до 94–96%) из-за потерь на выпрямлении и инвертировании. |
| Высокий коэффициент мощности (\(\cos \varphi\)): Для схем с неуправляемым выпрямителем он достигает 0.95–0.98 и не зависит от нагрузки двигателя. | Сложность рекуперации: Для возврата энергии в сеть требуется дорогой активный выпрямитель (Active Front End). |
| Плавность хода: Благодаря высокой частоте ШИМ, ток статора близок к синусоиде, что снижает пульсации момента. | Габариты фильтра: Электролитические конденсаторы звена постоянного тока занимают значительный объем и имеют ограниченный ресурс. |
| Простота управления: Силовая часть не требует синхронизации с фазой сети, схема ключей проще, чем в циклоконверторах. | Электромагнитные помехи: Высокочастотная коммутация IGBT создает сильные помехи, требующие экранирования кабелей и установки фильтров. |
2. Принципы частотного управления асинхронным двигателем (АД)
С появлением в середине 1990-х годов надежных IGBT-модулей и мощных цифровых сигнальных процессоров (DSP) произошла революция в электроприводе. Стало возможным не просто крутить двигатель, а реализовать векторное управление, при котором асинхронный двигатель по динамике не уступает двигателям постоянного тока.
Глобальная цель частотного управления: Задать требуемую частоту вращения ротора путем изменения частоты \(f_1\) и амплитуды \(U_1\) трехфазного напряжения так, чтобы двигатель работал в оптимальном режиме (максимальный КПД, перегрузочная способность) без магнитной перегрузки.
Основные виды управления:
- Скалярное управление (U/f control): Управление по статической характеристике.
- Векторное управление (Field Oriented Control — FOC): Управление переходными процессами и моментом.
2.1. Физика процесса: Почему нужно менять напряжение?
Изменение только частоты питающей сети \(f_1\) без коррекции напряжения недопустимо. Основное уравнение ЭДС двигателя выглядит так:
где \(w_1\) — число витков, \(\Phi\) — магнитный поток.
Отсюда следует, что магнитный поток пропорционален отношению напряжения к частоте: \(\Phi \sim U_1 / f_1\).
- Если уменьшить частоту \(f_1\) при неизменном напряжении \(U_1\), поток \(\Phi\) резко возрастет. Железо статора войдет в насыщение, ток намагничивания подскочит до аварийных значений, двигатель перегреется.
- Если увеличить частоту выше номинальной при неизменном напряжении, поток \(\Phi\) упадет. Это приведет к резкому падению вращающего момента (так как \(M \sim \Phi \cdot I_{rot}\)).
На рисунках 3 и 4 наглядно показано поведение механических характеристик двигателя.
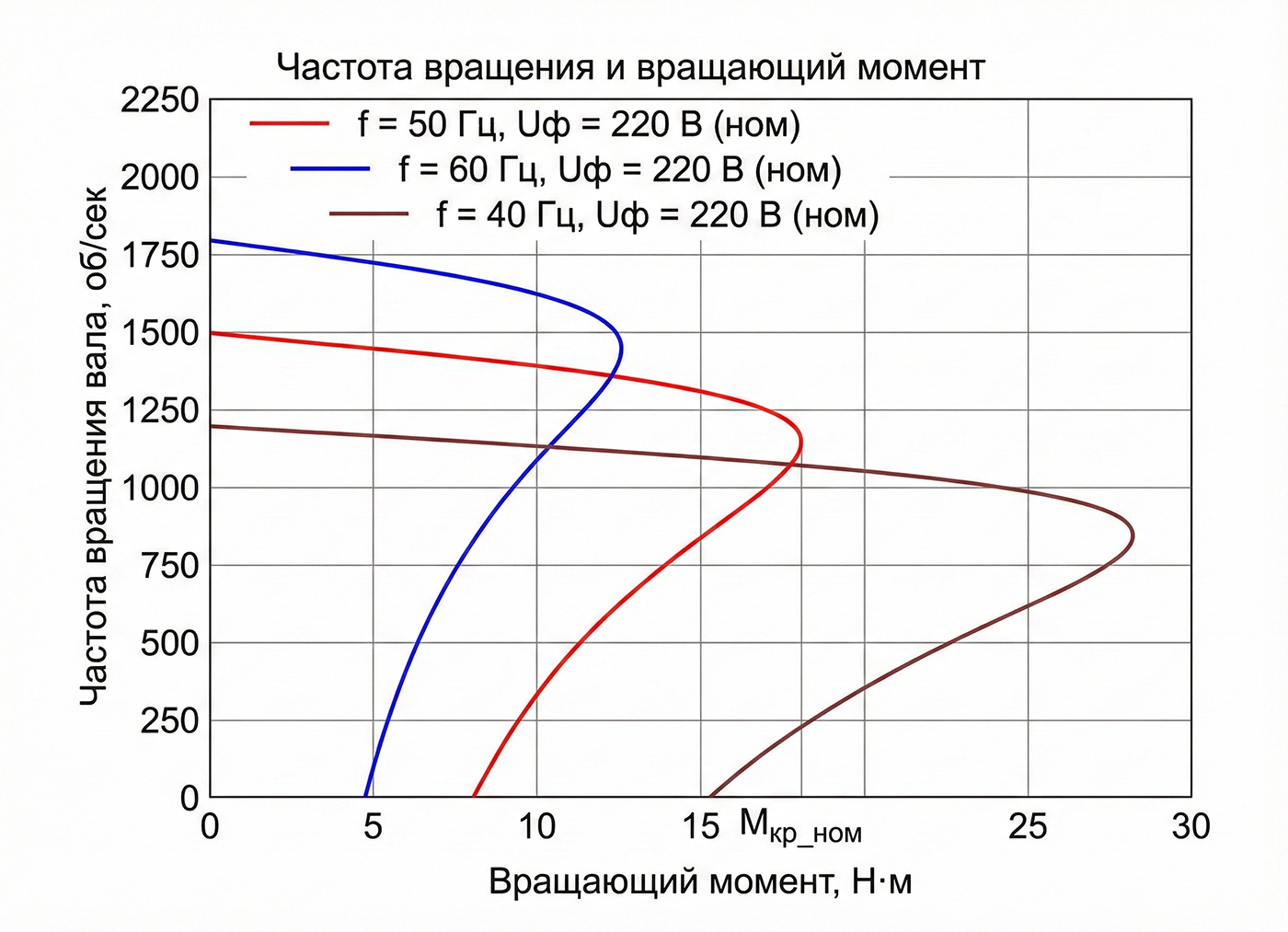
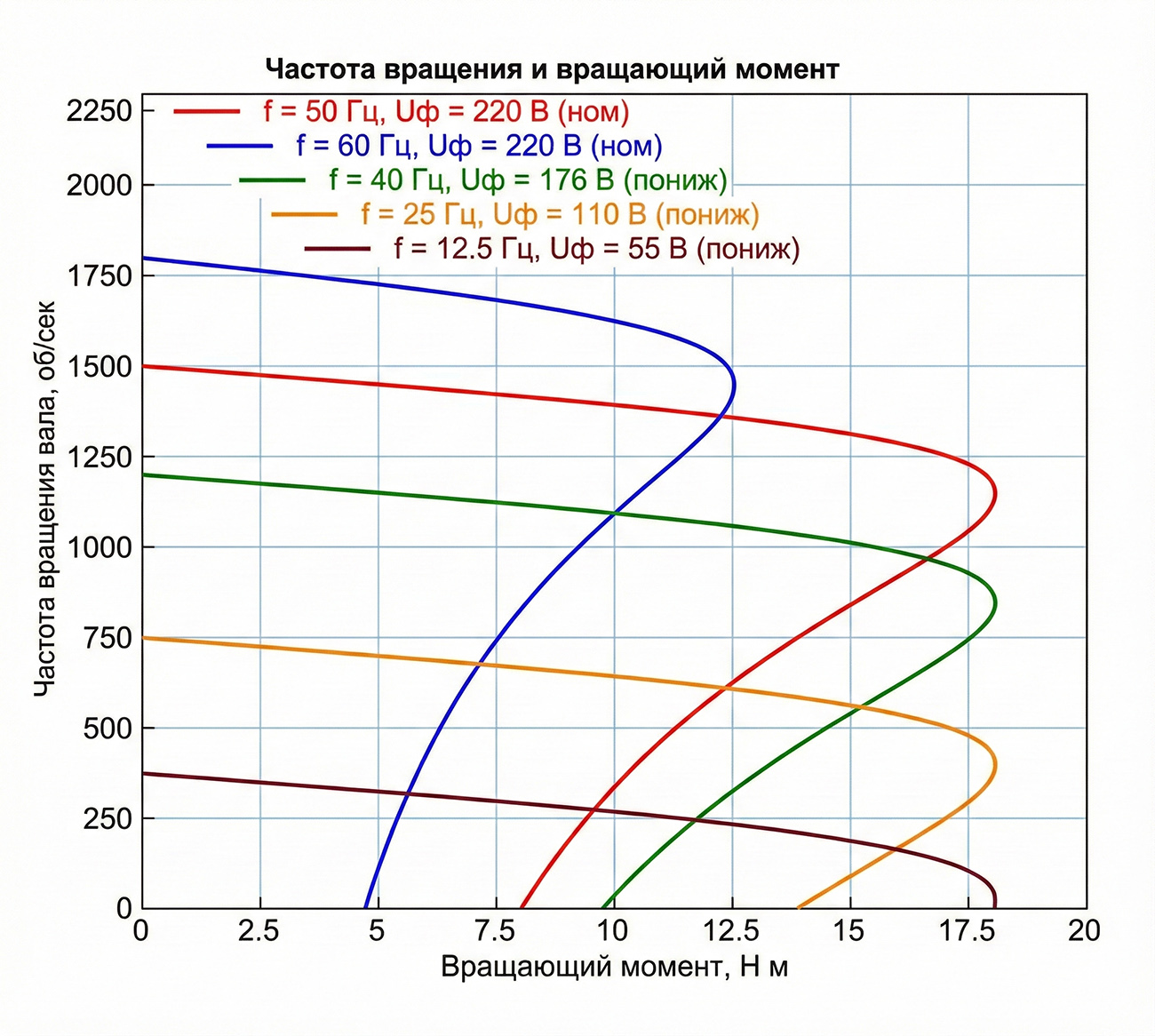
Как видно из рисунка 4, при снижении частоты необходимо пропорционально снижать напряжение (закон \(U/f = const\)), чтобы сохранить критический момент постоянным. Если же мы уходим в область частот выше номинальной (50 Гц), мы не можем поднять напряжение выше сетевого. В этой зоне (зона ослабления поля) момент падает обратно пропорционально частоте (или даже квадрату частоты), что ограничивает диапазон регулирования «вверх» примерно значением 1:2.
В «нижнюю» сторону диапазон ограничен снизу (5-10% от номинала) из-за падения охлаждения (крыльчатка на валу вращается медленно) и падения момента из-за активного сопротивления обмоток.
3. Особенности скалярного управления
Скалярное управление (V/f control) — это метод, при котором управляющая система формирует напряжение на выходе, основываясь на заранее заданной функциональной зависимости \(U = f(\omega)\). Это «слепое» управление: преобразователь не знает, как реально вращается ротор, он лишь выдает заданную частоту и напряжение.
3.1. Проблема падения напряжения (IR-компенсация)
Рассмотрим упрощенную эквивалентную схему одной фазы статора (Рисунок 5).
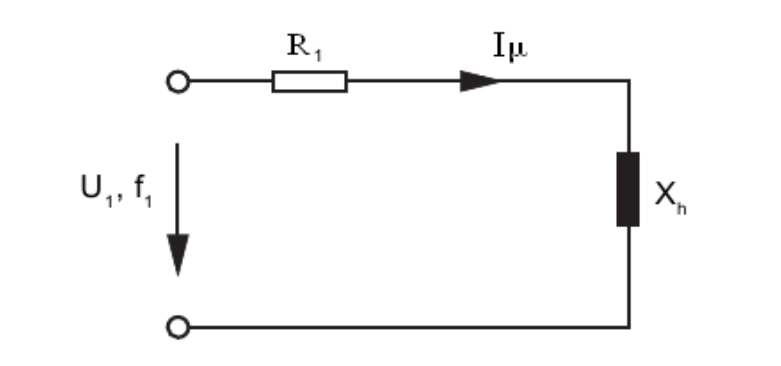
Полное сопротивление обмотки состоит из активного \(R_1\) (омическое сопротивление провода) и реактивного индуктивного \(X_h\). На высоких частотах \(X_h \gg R_1\), и влиянием \(R_1\) можно пренебречь:
Для поддержания тока намагничивания \(I_{\mu}\) постоянным достаточно держать \(U_1/f_1 = const\) (Рисунок 6, линейный участок).
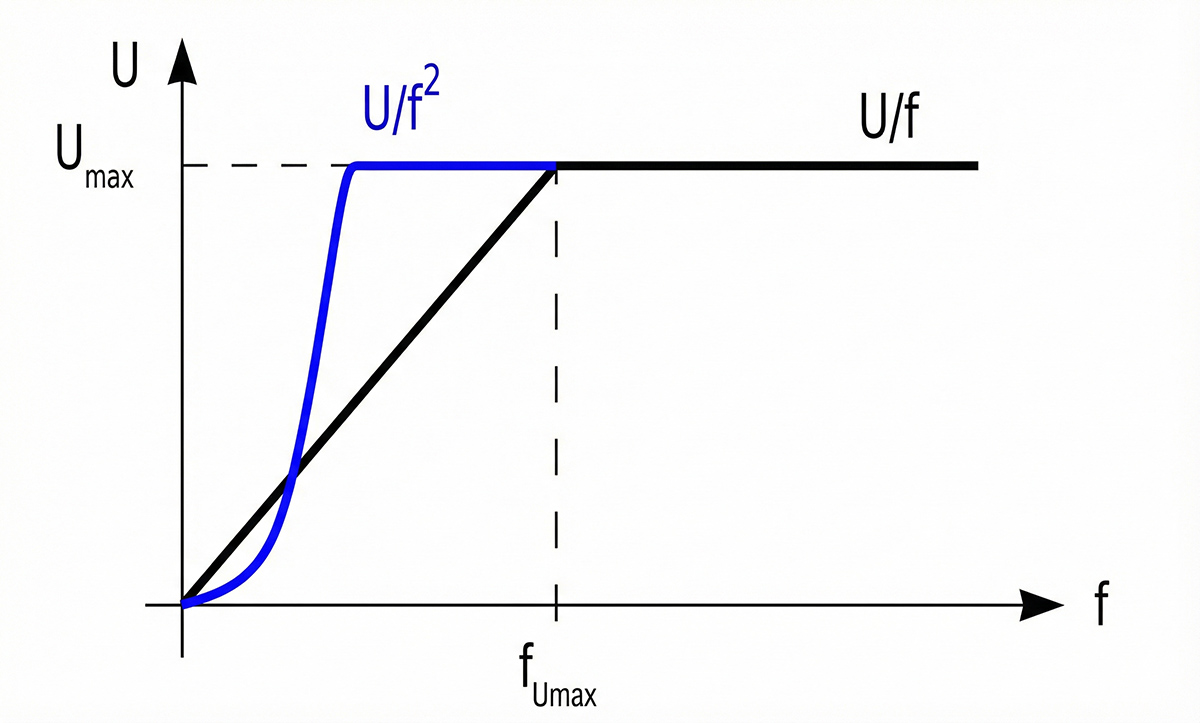
Однако на малых частотах индуктивное сопротивление \(X_h = 2\pi f L\) становится очень малым, и соизмеримым с активным сопротивлением \(R_1\). При нагрузке (когда \(s \neq 0\)) через \(R_1\) течет ток нагрузки (Рисунок 7), вызывая падение напряжения \(I \cdot R_1\).
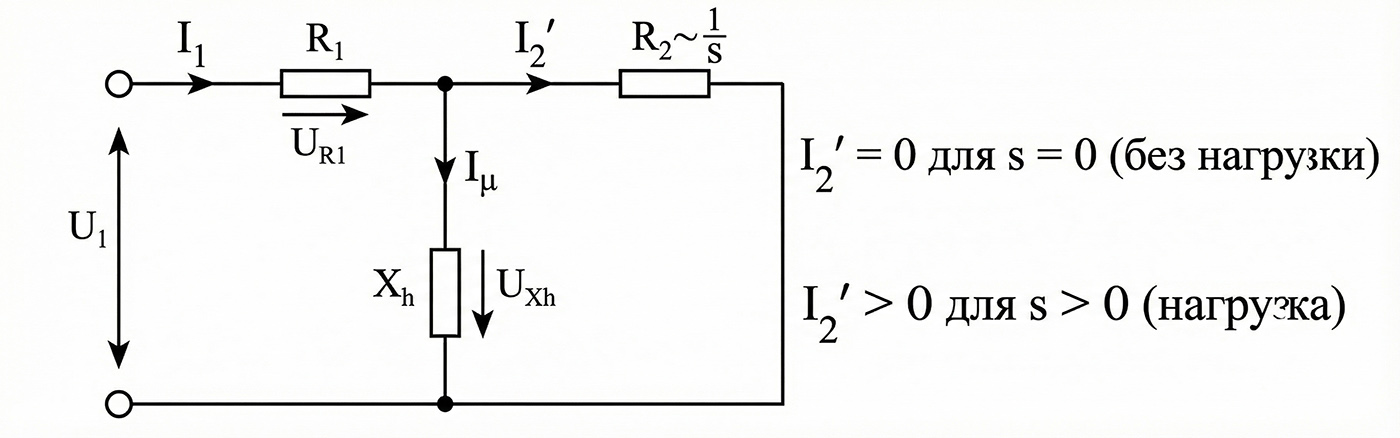
В результате на создание магнитного потока (на индуктивность \(X_h\)) приходится меньше напряжения, чем нужно. Поток падает, момент падает, двигатель может остановиться под нагрузкой.
Решение — Вольтодобавка (Boost): На низких частотах ПЧ намеренно завышает выходное напряжение (нарушает закон \(U/f\)), чтобы компенсировать падение на \(R_1\). Это называется «Буст» (Рисунок 8).
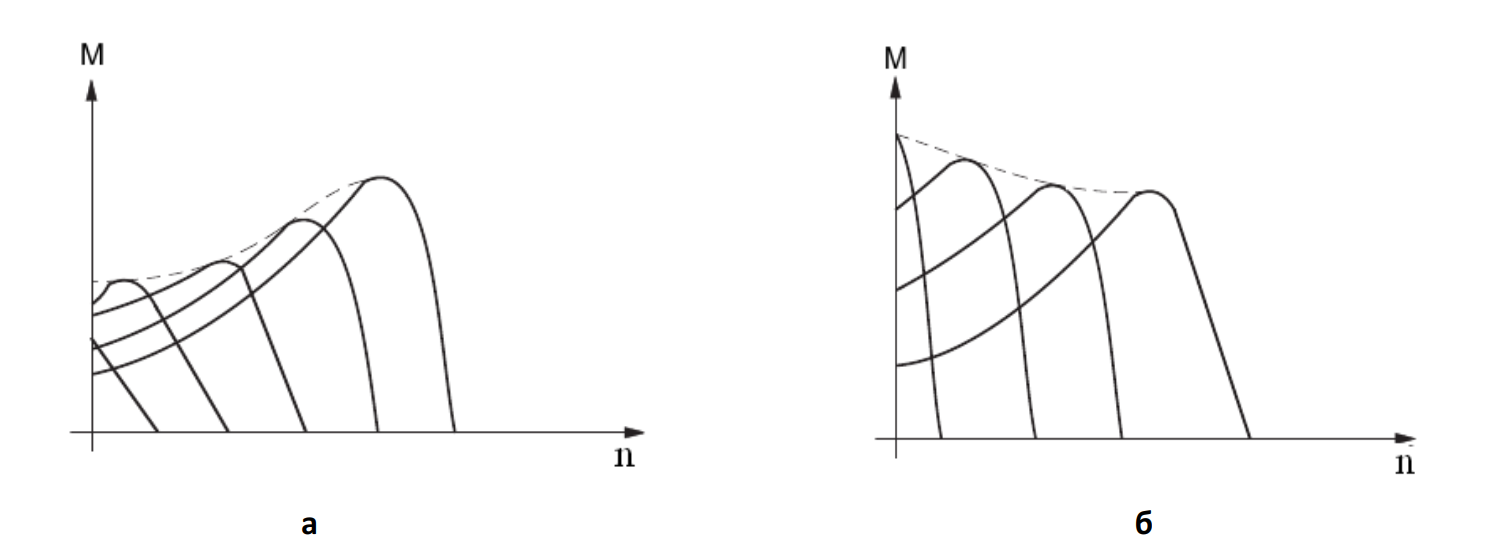
Замечание по настройке:
- Буст мал (Рис. 8,а): Двигатель не имеет силы стартовать под нагрузкой.
- Буст велик (Рис. 8,б): Чрезмерный ток намагничивания вызывает перегрев мотора даже на холостом ходу.
Скалярное управление идеально для насосов и вентиляторов (где нагрузка растет с оборотами), но плохо подходит для подъемников и конвейеров.
4. Векторное управление: Математика вместо грубой силы
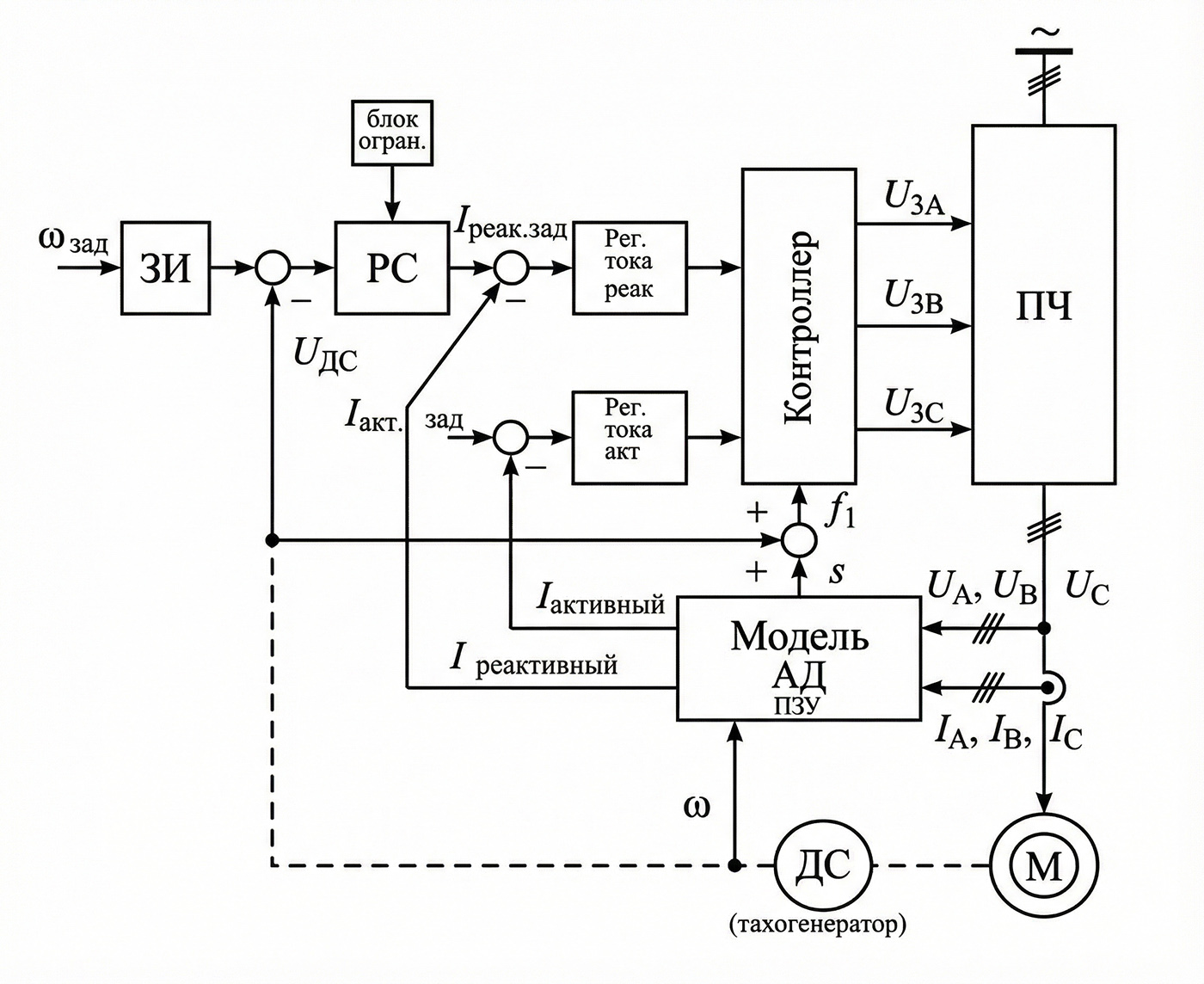
Векторное управление (Vector Control) было предложено инженерами Siemens (Блашке) в 1970-х. Суть метода заключается в математическом разделении тока статора на две ортогональные составляющие (в системе координат d-q, вращающейся с полем):
- Ток намагничивания (\(I_d\)): Аналог тока возбуждения в двигателе постоянного тока (создает магнитное поле).
- Ток моментообразующий (\(I_q\)): Аналог тока якоря (создает крутящий момент).
Управляя этими токами независимо, процессор может мгновенно менять момент, не дожидаясь изменения магнитного потока.
Векторное управление делится на:
- Бездатчиковое (Sensorless): Скорость и положение ротора вычисляются математической моделью по токам и напряжениям. Точность поддержания скорости ±0.5%, диапазон 1:100. Подходит для большинства общепромышленных задач.
- С обратной связью (Closed Loop): Используется энкодер (датчик угла поворота). Обеспечивает полный момент при 0 Гц (удержание груза), точность скорости до ±0.01% и диапазон более 1:10000.
Сравнение методов управления
| Характеристика | Скалярное (U/f) | Векторное (Sensorless) | Векторное с энкодером |
|---|---|---|---|
| Точность скорости | Низкая (зависит от скольжения) | Высокая (компенсация скольжения) | Прецизионная |
| Момент на низких частотах | Плохой (требует настройки буста) | Высокий (расчетный) | Полный момент с 0 оборотов |
| Реакция на наброс нагрузки | Медленная, возможны просадки | Быстрая (< 100 мс) | Мгновенная (< 10 мс) |
| Сложность настройки | Простая | Средняя (требует автотюнинга) | Сложная |
5. Построение цифровой системы управления
Мозгом современного ПЧ является микропроцессорная система. Требования к вычислительной мощности огромны: необходимо рассчитывать векторную модель двигателя, выполнять преобразования Парка-Кларк и генерировать ШИМ каждые 50-100 микросекунд.
5.1. Двухпроцессорная архитектура
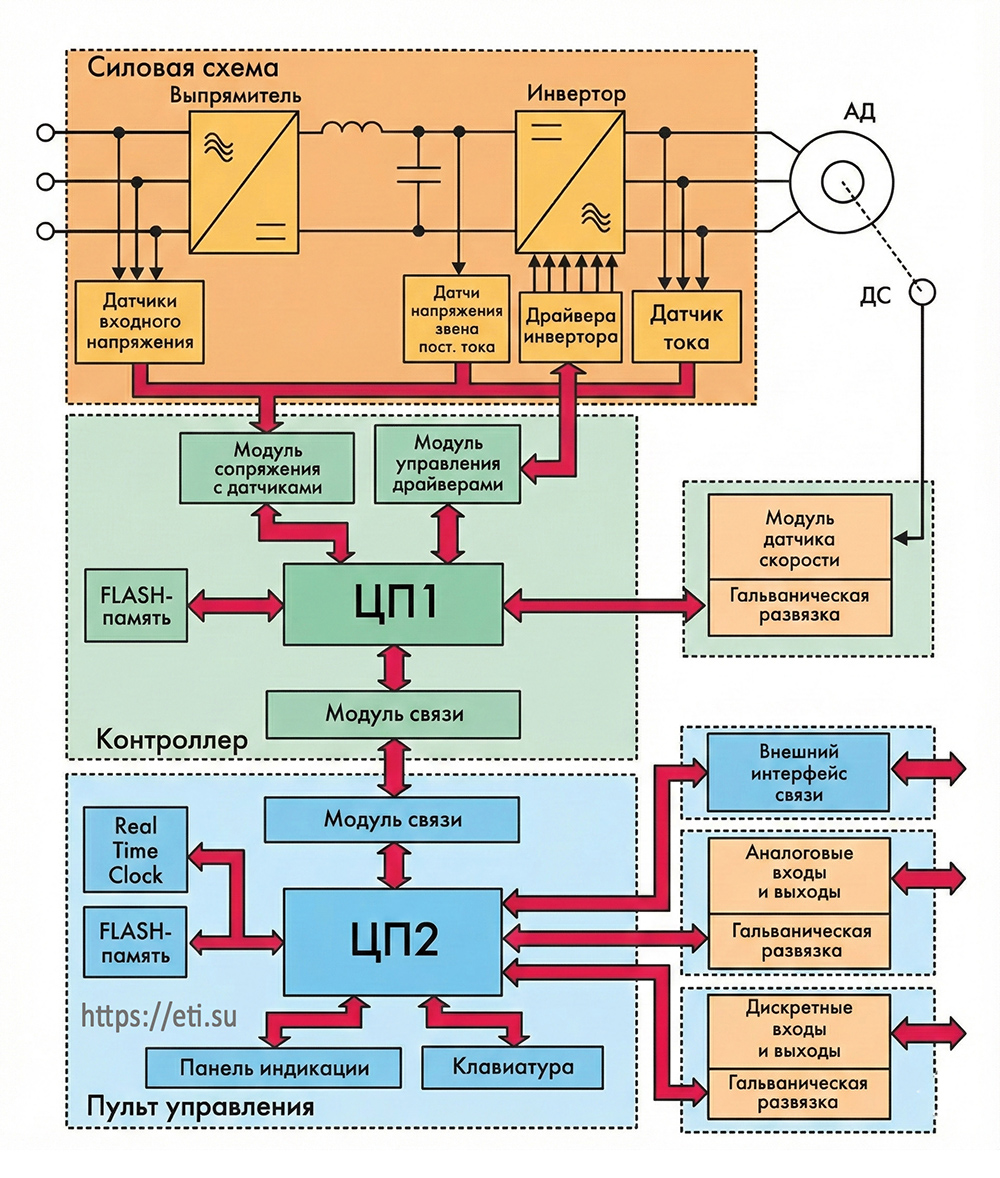
Для разделения критических задач реального времени и пользовательского интерфейса применяют схему с двумя процессорами (Рисунок 10):
- ЦП1 (Motor Control): Специализированный DSP (Digital Signal Processor). Занимается только математикой двигателя, защитами и генерацией ШИМ.
- ЦП2 (Application/Interface): Микроконтроллер общего назначения. Обслуживает клавиатуру, экран, сети (Modbus/Profibus), ПЛК-логику пользователя.
5.2. Интерфейсы и периферия
Модульная конструкция позволяет адаптировать ПЧ под задачу:
- Аналоговые входы (AI): Обычно 0-10В или 4-20мА. Используются для задания скорости потенциометром или поддержания давления по датчику (ПИД-регулятор).
- Дискретные входы (DI): Команды «Пуск», «Стоп», «Реверс», переключение скоростей. Гальванически развязаны оптопарарами.
- Релейные выходы (RO): Сигнализация статусов «Работа», «Авария» для внешних систем автоматики.
- Вход безопасного отключения (STO): Аппаратное отключение драйверов IGBT (мимо процессора) для систем безопасности персонала.
6. Сравнение Скалярного и Векторного режимов
| Характеристика | Скалярное (U/f) | Векторное (FOC) бездатчиковое | Векторное с энкодером (замкнутое) |
|---|---|---|---|
| Точность скорости | Низкая (зависит от скольжения) | Высокая (±0.5%) | Прецизионная (±0.01%) |
| Момент на 0 Гц | Отсутствует | Высокий, но нестабильный | Полный номинальный момент |
| Реакция на наброс нагрузки | Медленная, с просадкой скорости | Быстрая (<100 мс) | Мгновенная |
| Сложность настройки | Простая (ввел ток и напряжение) | Требует автотюнинга | Сложная, требует настройки датчика |
| Применение | Вентиляторы, насосы, конвейеры | Экструдеры, дробилки, станки | Лифты, краны, робототехника |
7. FAQ: Часто задаваемые вопросы
Да, но есть нюанс. При низких скоростях штатный вентилятор двигателя (крыльчатка на валу) не охлаждает его эффективно. Требуется установка принудительного охлаждения («наездника»). Также изоляция старых двигателей может не выдержать высокочастотных пиков напряжения от ШИМ.
Без дросселей обычно до 50 метров. При длинах свыше 50–100 м емкость кабеля вызывает паразитные токи утечки, а эффект отраженной волны может удвоить напряжение на клеммах двигателя, пробивая изоляцию. В таких случаях обязательна установка моторного дросселя (L2 на Рисунке 1).
На насосах и вентиляторах — колоссально (до 30–60%). Зависимость мощности от скорости там кубическая (\( P \sim n^3 \)). Снизив скорость всего на 20%, мы снижаем потребление энергии почти вдвое. На конвейерах и станках экономия менее заметна и достигается за счет оптимизации техпроцесса.
Он нужен для инерционных нагрузок (краны, центрифуги). Когда нужно быстро остановить механизм, энергия вращения должна куда-то уйти. Если не сжечь её на резисторе, она вернется в конденсаторы ПЧ и вызовет ошибку «Overvoltage» (Перенапряжение).
Это частота переключения транзисторов (обычно 2–16 кГц). Чем она выше, тем «чище» синусоида тока и тише работает двигатель (меньше акустический писк). Но при этом растут потери на нагрев самого преобразователя и увеличиваются токи утечки.
8. Интересные факты о частотном регулировании
- Поющие моторы. При определенной несущей частоте (слышимый диапазон 1–10 кГц) обмотки двигателя вибрируют и издают характерный писк. Современные ПЧ умеют «размазывать» спектр частоты (функция Random PWM), делая звук похожим на белый шум, менее раздражающий ухо.
- Эффект бумеранга. В длинном кабеле импульс напряжения бежит к двигателю, отражается от него и возвращается назад, накладываясь на следующую волну. Это может создать на клеммах напряжение до 1200–1600 Вольт в сети 380В.
- Матричные конвертеры. Существуют ПЧ без конденсаторов вообще. Они состоят из 9 двунаправленных ключей и соединяют любую фазу входа с любой фазой выхода напрямую.
- Космические технологии. Векторное управление использует преобразования координат, изначально разработанные для навигации космических аппаратов и гироскопов.
- Подшипниковые токи. Из-за несимметрии магнитного поля и высокочастотных наводок на валу двигателя наводится напряжение. Оно пробивает масляную пленку подшипников, вызывая электроэрозию («стиральную доску») на обоймах, выводя подшипник из строя.
- Сверхскорости. Специальные ПЧ для центрифуг обогащения урана или шпинделей станков могут выдавать выходную частоту до 2000–3000 Гц и выше.
- Рекуперация в сеть. Если заменить входной диодный мост на IGBT-мост (Active Front End), частотник может возвращать энергию торможения обратно в городскую сеть, заставляя счетчик крутиться назад.
9. Типичные ошибки при эксплуатации ПЧ
Статистика сервисных центров показывает: 80% поломок ПЧ вызваны не браком, а ошибками монтажа. Ниже — топ-5 ошибок, убивающих оборудование.
9.1. Контактор в цепи «ПЧ — Двигатель»
Суть: Размыкание контактора под нагрузкой.
Физика: При разрыве тока в индуктивности мотора возникает мощный выброс ЭДС самоиндукции \( e = -L \cdot di/dt \). Этот высоковольтный импульс «пробивает» открытые IGBT-транзисторы и варисторы.
Решение: Коммутировать выход только при остановленном двигателе (0 Гц). Для аварийного останова использовать вход STO или «Enable». Контактор ставить только на входе ПЧ.
9.2. Конденсаторы (КРМ) на выходе
Суть: Подключение конденсаторов к мотору для повышения \( \cos \varphi \).
Физика: Выход ПЧ — это ШИМ-импульсы высокой частоты (кГц). Сопротивление конденсатора \( X_c = 1/(2\pi f C) \) на этих частотах стремится к нулю. Для ПЧ это равносильно короткому замыканию.
Итог: Мгновенный выход из строя IGBT-модулей.
9.3. Пуск/Стоп коммутацией сетевого питания
Суть: Использование входного пускателя для управления работой привода.
Физика: При каждом включении происходит зарядка конденсаторов DC-звена через ограничительный резистор. Он рассчитан на кратковременную работу. При частых включениях (чаще раза в 3 мин) резистор перегревается и сгорает.
Решение: Питание на ПЧ подавать постоянно. Управлять пуском через дискретные входы.
9.4. Малое время торможения (Ошибка Overvoltage)
Суть: Быстрая остановка инерционной нагрузки без спецсредств.
Физика: Двигатель переходит в генераторный режим. Энергия возвращается в ПЧ быстрее, чем рассеивается, вызывая рост напряжения на шине постоянного тока до аварийного уровня.
Решение: Увеличить время торможения в настройках или установить тормозной резистор.
9.5. Отсутствие экранирования и заземления
Суть: Использование обычного кабеля и плохая «земля».
Физика: Выходной кабель ПЧ — источник мощных ВЧ-помех. Без экрана он наводит помехи на датчики (4-20 мА) и интерфейсы (RS-485).
Решение: Использовать симметричный экранированный кабель. Экран заземлять с двух сторон (на 360°) специальными хомутами. Разносить силовые и сигнальные линии.
Заключение
Современный преобразователь частоты — это высокоинтеллектуальное устройство, объединяющее силовую электронику и передовые цифровые технологии. Переход от простейшего скалярного управления к векторному позволил использовать асинхронные двигатели в сложнейших задачах робототехники и точного машиностроения, вытесняя дорогие и сложные в обслуживании двигатели постоянного тока.
Нормативная база
Проектирование и эксплуатация систем с ПЧ должны вестись в строгом соответствии со стандартами. Основные действующие документы в РФ:
- ГОСТ Р 51317.6.4-2009 (МЭК 61000-6-4:2006) — Электромагнитная совместимость. Нормы помехоэмиссии для промышленных обстановок.
- ГОСТ IEC 61800-3-2016 — Системы силовых электроприводов. Требования ЭМС и методы испытаний.
Список рекомендуемой литературы
- Ильинский Н.Ф., Москаленко В.В. Электропривод: энерго- и ресурсосбережение. — М.: Академия, 2008. — Фундаментальный учебник, подробно описывающий физику процессов энергосбережения при частотном регулировании.
- Виноградов А.Б. Векторное управление электроприводами переменного тока. — Иваново: ИГЭУ, 2008. — Отличный материал для понимания математики векторного управления и бездатчиковых алгоритмов.
- Соколовский Г.Г. Электроприводы переменного тока с частотным регулированием. — М.: Издательский центр «Академия», 2006. — Классическое пособие, разбирающее как скалярные, так и векторные режимы с точки зрения теории автоматического управления.