
Индуктивные датчики. Устройство, типы и виды индуктивных датчиков.
Индуктивные датчики применяются для преобразования в электрический сигнал небольших линейных и угловых перемещений. Простейший индуктивный датчик (называемый однотактным) представляет собой катушку индуктивности 1 с железным сердечником 2 и подвижным якорем З, отделенным от сердечника воздушным зазором (рис. 2-4). Катушка индуктивности с сердечником, называемая статором датчика, закрепляется неподвижно, а якорь соединяется механически с подвижной частью ОУ, перемещение которой нужно преобразовывать в электрический сигнал. При перемещении якоря изменяется сопротивление магнитной цепи датчика вследствие изменения воздушного зазора δ между статором и якорем (при вертикальном движении якоря) или площади воздушного зазора S (при горизонтальном движении якоря).
Сопротивление магнитной цепи датчика складывается из сопротивления участка цепи со сталью Rст и сопротивления участка цепи с воздушным зазором Rв. Магнитное сопротивление участка цепи со сталью:
Rст = Lст/(mст/Sст),
где Lст - суммарная длина средней магнитной силовой линии в стали сердечника и якоря; Sст — площадь поперечного сечения стального сердечника; mст — магнитная проницаемость материала сердечника и якоря.
Магнитное сопротивление участка цепи с воздушным зазором:
Rст = 2δ/(μоSв), где δ — длина воздушного зазора между статором и якорем датчика; μо - проницаемость воздуха; Sв - площадь поперечного сечения воздушного зазора. Так как μо>>μо, то Rст
Переменный магнитный поток Ф, возникающий при подключении источника питания к катушке датчика, равен
Ф = Iω/Rм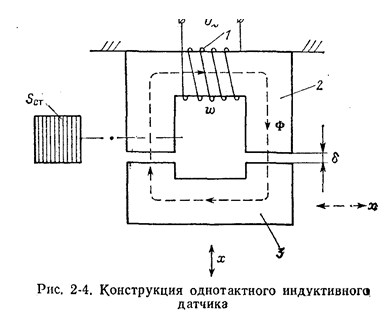
где I - ТОК в цепи катушки датчика; w - число витков катушки датчика,w - число витков катушки датчика.
Индуктивность катушки датчика (если пренебречь потоком рассеяния):
L = ωФ/I = [ω2/2δ]μS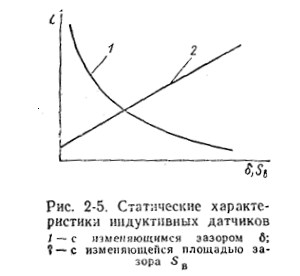
Формула (2-1) устанавливает функциональную связь между перемещением якоря индуктивного датчика (при перемещении изменяется или d, или Sв) и индуктивностью катушки датчика.
У индуктивных датчиков с изменяющимся воздушным зазором статическая характеристика L=f(x) нелинейная (рис. 2-5, 1) и при больших зазорах (δ > 1 мм) чувствительность датчика уменьшается. Такие датчики используют при ограниченном диапазоне перемещения якоря - до 1 мм, а начальная рабочая точка выбирается в области характеристики, где она имеет наибольшую крутизну и приближается к линейной чувствительность датчиков с изменяющимся воздушным зазором высокая – до 0,2 мкм.
У индуктивных датчиков с изменяющейся площадью воздушного зазора статическая характеристика L=f(Sв) линейная, диапазон перемещения якоря шире — до 8 мм, но чувствительность меньше - до 0,3 мкм (рис. 2-5, 2). Изменение индуктивности катушки датчика L приводит к изменению ее индуктивного сопротивления: ХL = ωL, где ω - круговая частота питающего напряжения. Следовательно, происходит и изменение полного сопротивления катушки: Z = √Rа*2+XL*2, где Ra - активное сопротивление катушки датчика.
Ток I, протекающий в катушке датчика под действием приложенного переменного напряжения U, также изменяется при перемещении якоря и может служить выходным сигналом датчика (выходной характеристикой). Условно принцип работы индуктивных датчиков можно представить в виде цепи преобразований происходящих при перемещении якоря датчика (для датчиков с изменяющимся воздушным зазором):
x↑ → δ↑ → Rm↑ → Ф↓ → L↓ → Xl↓ → Z↓ → I↑Однотактные индуктивные датчики имеют высокую чувствительность и надежность, практически неограниченный срок службы, большую мощность выходного сигнала (до нескольких ватт), что позволяет в ряде случаев не применять усилитель. К недостаткам индуктивных датчиков следует отнести нереверсивность характеристики, небольшой диапазон перемещений якоря, наличие тока холостого хода и электромагнитной силы притяжения между якорем и статором, влияние колебаний амплитуды и частоты напряжения питания. Эти недостатки полностью или частично отсутствуют у дифференциальных индуктивных датчиков.
Дифференциальный индуктивный датчик
Он содержит два статора с катушками индуктивности L1 и L2 и один общий якорь. При перемещении якоря индуктивность одной катушки увеличивается, другой — уменьшается. Катушки индуктивности включаются или в дифференциальную измерительную схему, или как смежные плечи в мостовую измерительную схему.
Дифференциальные индуктивные датчики по сравнению с однотактными имеют более высокую точность преобразования и чувствительность. Статическая характеристика этих датчиков линейная и реверсивная.
Трансформаторные датчики
Они являются разновидностью индуктивных датчиков. Трансформаторный датчик можно рассматривать как трансформатор, у которого коэффициент трансформации изменяется за счет изменения коэффициента взаимоиндуктивности М между его обмотками. Такие датчики применяются для преобразования в электрический сигнал (напряжение переменного тока) небольших линейных и угловых перемещений.
На рис. 2-6 представлен дифференциальный трансформаторный датчик с угловым перемещением якоря. Первичная обмотка датчика ω1 расположена на центральном стержне сердечника 1 и подключена к источнику переменного тока. Вторичные обмотки ω2а и ω2б расположены на крайних стержнях и соединяются последовательно и встречно. Ток, протекающий по ω1 создает переменный магнитный поток Ф1, разветвляющийся на два потока: Ф1а и Ф1б. При симметричном положении якоря 2 по отношению к статору датчика (сердечник 1 с обмотками ω1, ω2а и ω2б) магнитные потоки равны: Ф1а=Ф1б=Ф1/2, и ЭДС, индуцирующиеся во вторичных обмотках, будут также равны: Е2а=Е2б.
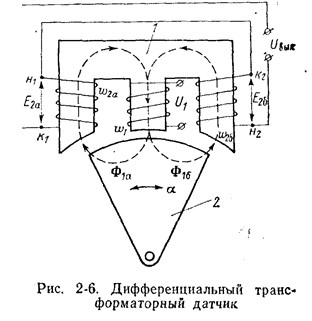
Так как фазы этих ЭДС противоположны (за счет встречного включения обмоток ω2а и ω2б), то напряжение на выходе датчика будет равно нулю: Uвых = Е2а — Е2б=О. При повороте якоря, который механически связан с подвижной частью объекта управления, изменяются площади поперечного сечения воздушных зазоров и между якорем и крайними стержнями сердечника. В результате этого изменятся сопротивления RM1 и RM2 магнитных цепей потоков Ф1а и Ф1б, да и сами потоки: один из них увеличивается на ΔФ, а другой уменьшится на ΔФ. Индуцирующие во вторичных обмотках ЭДС Е2а и Е2б также изменятся пропорционально изменению потоков ФIа и Ф2б. На выходе датчика появится напряжение Uвых, амплитуда которого равна разности амплитуд ЭДС Е2а и Е2б: Uвых = Е2а-Е2б, а фаза выходного напряжения будет определяться фазой большей из ЭДС.
Таким образом, характеристика такого датчика будет реверсивной и линейной (в рабочей зоне). Чувствительность дифференциального трансформаторного датчика в два раза выше, чем у однотактного, рабочая зона в два раза больше, и при симметричном положении якоря выходное напряжение равно нулю. Точность преобразования у дифференциальных трансформаторных датчиков выше, так как ввиду симметричности конструкции и схемы датчика частично взаимно компенсируются погрешности от изменения окружающей температуры и частоты источника питания.