Содержание страницы
- 1. Конструктивное исполнение и устройство
- 2. Принцип действия и процесс синхронизации
- 3. Физические процессы и электромагнитная индукция
- 4. Угловые характеристики и устойчивость
- 5. Сравнение синхронных и асинхронных двигателей
- 6. Промышленное применение: Современные методы пуска синхронных двигателей
- 7. Преимущества и недостатки
- 8. Интересные факты о синхронных машинах
- 9. Часто задаваемые вопросы (FAQ)
- Заключение
Синхронный двигатель — это электрическая машина переменного тока, ротор которой вращается с частотой, равной частоте вращения магнитного поля в воздушном зазоре. Основная особенность данного типа машин заключается в жесткой связи между скоростью вращения вала и частотой питающей сети, что описывается уравнением \( n = \frac{60f}{p} \). Эти машины являются основой современной энергетики и мощного промышленного привода.
1. Конструктивное исполнение и устройство
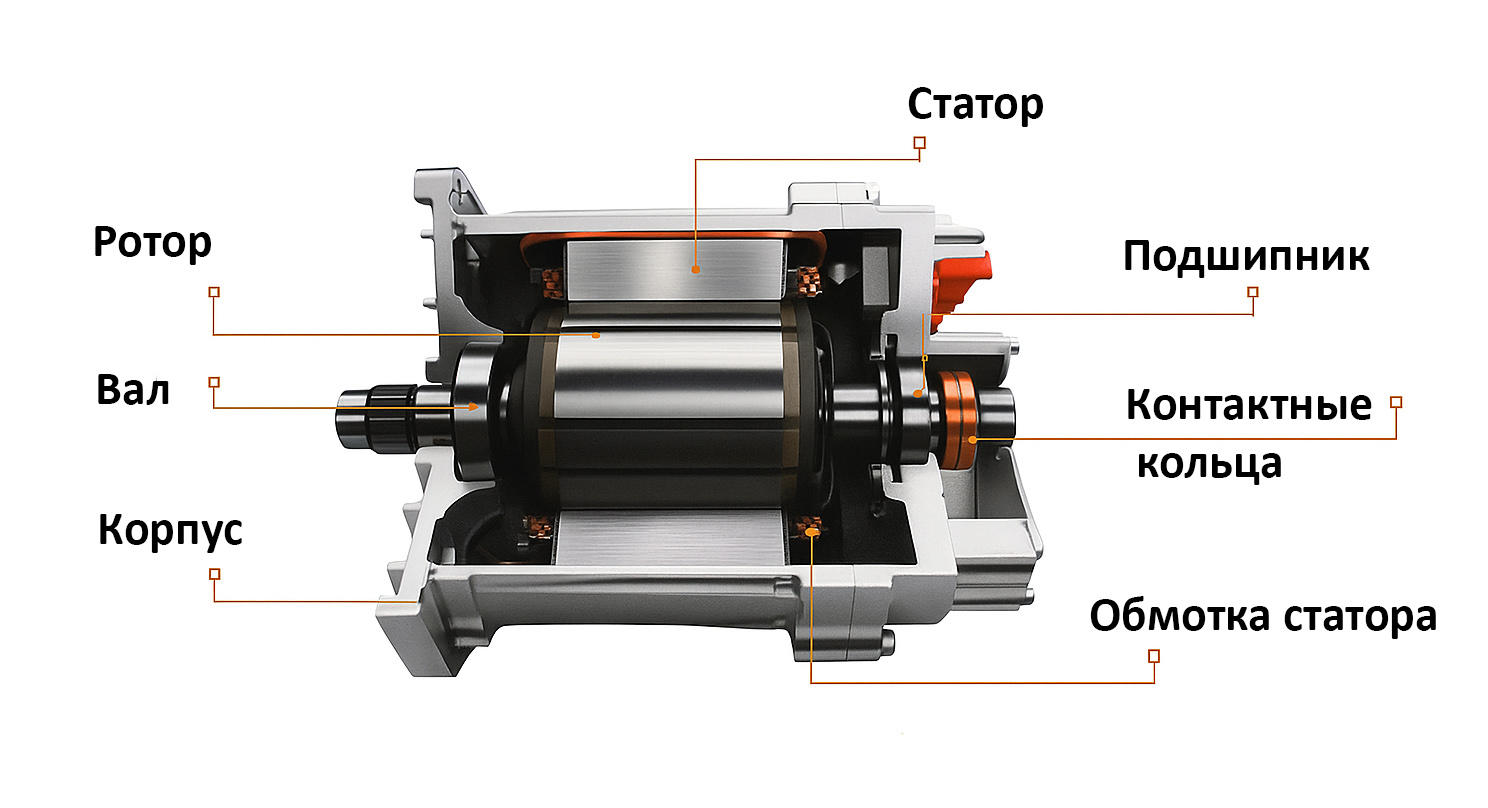
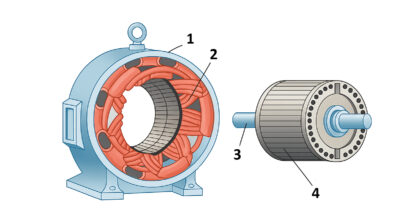
Как и все классические электрические машины вращательного типа, синхронные двигатели состоят из двух основных функциональных частей: статора (неподвижная часть) и ротора (вращающаяся часть).
1.1. Статор
Статор синхронного двигателя имеет устройство, практически не отличающееся от конструкции статора асинхронного двигателя. Его сердечник набирается из изолированных листов электротехнической стали для снижения потерь на вихревые токи. В пазах сердечника укладывается трехфазная распределенная обмотка. Обмотки статора подключаются к трехфазной сети переменного тока и создают вращающееся магнитное поле с угловой частотой \( \omega_c \), которая жестко привязана к частоте сети \( f \):
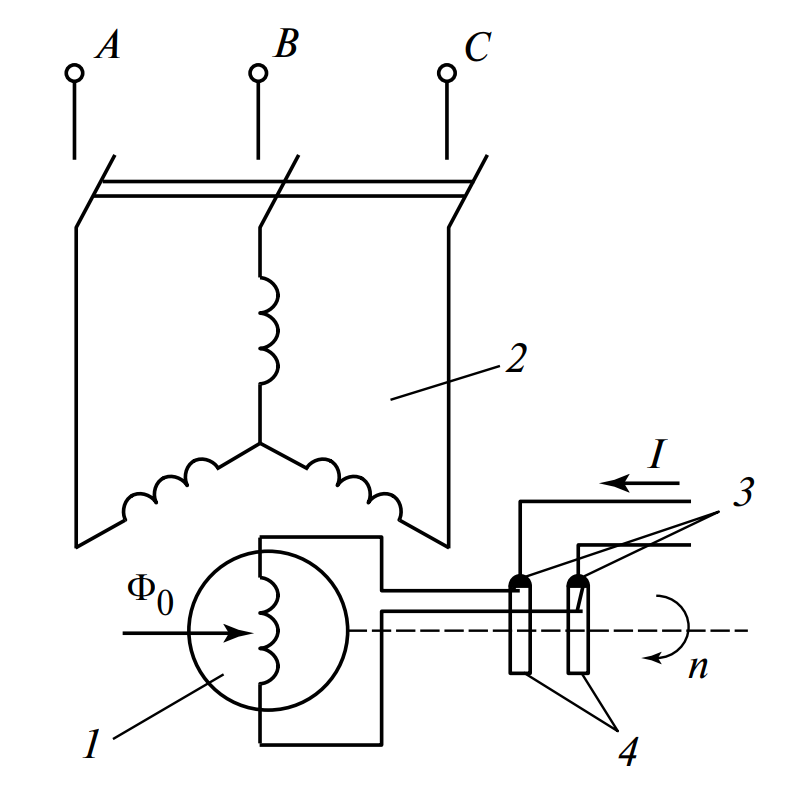
1.2. Ротор и система возбуждения
Ротор является ключевым элементом, отличающим синхронную машину от асинхронной. Он содержит обмотку возбуждения, по которой протекает постоянный ток. Этот ток создает магнитный поток, неподвижный относительно самого тела ротора. Таким образом, можно считать, что ротор представляет собой мощный электромагнит (или постоянный магнит в машинах малой мощности).
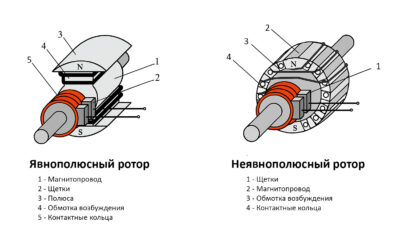
По конструкции роторы делятся на два типа:
- Явнополюсные: Характеризуются ярко выраженными полюсами. Используются в тихоходных двигателях (большое число пар полюсов \( p \)).
- Неявнополюсные: Имеют цилиндрическую форму. Применяются в быстроходных машинах (турбогенераторах и высоковольтных двигателях с \( n = 1500-3000 \) об/мин).
2. Принцип действия и процесс синхронизации
В основе работы лежит взаимодействие вращающегося магнитного поля статора и постоянного магнитного поля ротора. Разноименные полюса полей притягиваются, образуя «магнитную сцепку». Магнитное поле статора как бы «ведет» за собой ротор, и они вращаются синхронно с одной частотой.
2.1. Проблема пуска
В нормальных условиях синхронный двигатель не имеет начального пускового момента. Это связано с инерционностью ротора. При подключении статора к сети его поле мгновенно начинает вращаться с синхронной скоростью (например, 3000 об/мин). Тяжелый ротор в первый момент времени неподвижен. Знакопеременные силы меняют направление слишком быстро (50 раз в секунду), и ротор не успевает сдвинуться с места. Поэтому прямой пуск (подача напряжения на статор и тока в ротор) невозможен.
2.2. Асинхронный пуск
Чтобы осуществить пуск двигателя, применяют дополнительные меры, наиболее распространенной из которых является асинхронный пуск. Для этого в полюсных наконечниках ротора помещают дополнительную короткозамкнутую обмотку (пусковую клетку), которая конструктивно аналогична «беличьей клетке» асинхронного двигателя.
Алгоритм пуска:
- Обмотка статора подключается к сети.
- Штатная обмотка возбуждения ротора отключается от источника постоянного тока и замыкается на гасящее сопротивление (во избежание пробоя изоляции от высоких наведенных ЭДС).
- Пусковая клетка взаимодействует с вращающимся полем статора, создавая асинхронный момент. Двигатель разгоняется как асинхронный.
- Ротор достигает подсинхронной частоты (близкой к частоте поля, \( s \approx 0.05 \)).
- В этот момент обмотка ротора подключается к источнику постоянного тока. Возникает постоянное магнитное поле.
- Магнитный поток статора «захватывает» магнитный поток ротора, происходит втягивание в синхронизм.
3. Физические процессы и электромагнитная индукция
Магнитное поле ротора при его вращении пересекает витки обмотки статора. Согласно закону Фарадея, оно наводит в них электродвижущую силу (ЭДС) электромагнитной индукции \( E_0 \). Величина этой ЭДС зависит от тока возбуждения и частоты вращения.
При отсутствии нагрузки на валу двигателя (режим холостого хода) и пренебрежении активным сопротивлением обмоток, наведенная ЭДС \( E_0 \) практически уравновешивает приложенное напряжение питающей сети \( U \), то есть:
3.1. Реакция якоря и уравнение напряжений
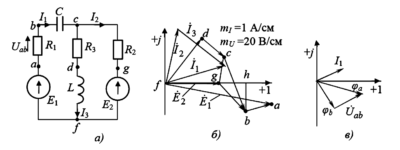
При появлении механической нагрузки на валу ротор начинает отставать от вращающегося поля на некоторый угол \( \theta \) (угол нагрузки). Нарушается баланс ЭДС и напряжения, и в обмотке статора появляется ток \( I \). Уравнение электрического равновесия для цепи статора (для одной фазы) в комплексной форме принимает вид:
где:
- \( \dot{U} \) — вектор напряжения сети;
- \( \dot{E}_0 \) — вектор ЭДС, наведенной полем ротора;
- \( x_c \) — синхронное индуктивное сопротивление обмотки статора (сумма индуктивного сопротивления рассеяния и сопротивления реакции якоря);
- \( \dot{I} \) — ток статора (якоря).
Ток статора создает свое магнитное поле (реакция якоря), которое, складываясь с полем ротора, формирует результирующее магнитное поле машины.
4. Угловые характеристики и устойчивость
Важнейшей характеристикой синхронного двигателя является угловая характеристика — зависимость электромагнитного момента \( M \) от угла нагрузки \( \theta \). В упрощенном виде для неявнополюсной машины она выражается формулой:
Где \( m \) — число фаз. Из формулы видно, что максимальный момент достигается при угле \( \theta = 90^\circ \). Если механическая нагрузка превысит максимальный электромагнитный момент, двигатель выпадет из синхронизма (произойдет остановка), что является аварийным режимом.
5. Сравнение синхронных и асинхронных двигателей
Для понимания места синхронных машин в промышленности приведем сравнительный анализ.
| Характеристика | Синхронный двигатель (СД) | Асинхронный двигатель (АД) |
|---|---|---|
| Частота вращения | Строго постоянная (\( n = n_c \)), не зависит от нагрузки (в рабочих пределах) | Зависит от нагрузки, всегда меньше синхронной (\( n < n_c \)) |
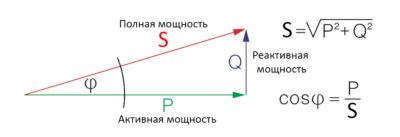
| Коэффициент мощности (\(\cos \varphi\)) | Регулируемый (может быть = 1 или опережающим) | Всегда отстающий (потребляет реактивную энергию) |
| Реакция на колебания напряжения | Момент пропорционален \( U \) (более устойчив) | Момент пропорционален \( U^2 \) (сильно падает при просадках сети) |
| Конструкция и обслуживание | Сложнее (требует источник возбуждения, щетки/кольца или выпрямитель) | Простая, надежная (особенно с короткозамкнутым ротором) |
| Стоимость | Высокая | Низкая |
6. Промышленное применение: Современные методы пуска синхронных двигателей
Законы электромагнитной индукции находят свое сложнейшее применение в управлении мощными электрическими машинами. Рассмотрим практическую реализацию этих принципов на примере эволюции систем пуска синхронных двигателей (СД), где управление магнитными потоками играет решающую роль.
Традиционные схемы асинхронного пуска (прямого или реакторного), основанные на индукционных токах в демпферной обмотке, характеризуются высокими кратностями пусковых токов \( I_p/I_{nom} = 5 \dots 7 \). Это вызывает значительные просадки напряжения в питающей сети и ударные механические нагрузки на валопровод. В современной электротехнике осуществляется переход к управляемому пуску с использованием силовой полупроводниковой техники.
6.1. Частотный пуск (LCI и VSI топологии)
Частотный пуск реализуется с помощью высоковольтных преобразователей частоты (ВПЧ). Принцип основан на плавном увеличении частоты питающего напряжения \( f \) от нуля до номинального значения \( 50 \) Гц. Это позволяет поддерживать постоянство магнитного потока в зазоре машины согласно закону Костенко:
$$ \frac{U}{f} \approx \text{const} $$
При этом электромагнитный момент двигателя \( M \) остается постоянным и близким к номинальному во всем диапазоне разгона, так как:
$$ M = c \cdot \Phi \cdot I \cdot \cos \psi $$
Где \( \Phi \) — магнитный поток, \( I \) — ток статора, \( \psi \) — угол сдвига фаз. Так как поток \( \Phi \) постоянен (за счет регулирования \( U/f \)), двигатель способен запускаться под нагрузкой без токовых перегрузок сети.
Особенности синхронизации: При частотном пуске возбуждение подается на обмотку ротора уже при малых оборотах (или с нулевой скорости), и двигатель сразу входит в синхронизм на низкой частоте, после чего разгоняется в синхронном режиме.
6.2. Устройства плавного пуска (УПП/Soft Starters)
Тиристорные устройства плавного пуска (ТРН) реализуют фазовое регулирование напряжения. Встречно-параллельные тиристоры в каждой фазе статора ограничивают действующее значение напряжения \( U(t) \).
Поскольку вращающий момент асинхронного пуска (на подсинхронной скорости) пропорционален квадрату напряжения:
$$ M \sim U^2 $$
Снижение напряжения в \( k \) раз приводит к снижению момента в \( k^2 \) раз. Поэтому УПП применимы только для механизмов с «вентиляторной» характеристикой нагрузки (момент сопротивления зависит от скорости квадратично: \( M_c \sim \omega^2 \)) и пуском на холостом ходу.
6.3. Цифровые системы возбуждения
Современный пуск невозможен без микропроцессорных возбудителей (например, ВТЕ, ВТЦ). Они управляют подключением разрядного сопротивления \( R_p \) в цепь ротора. Алгоритм обеспечивает подачу тока возбуждения в момент наиболее благоприятного угла скольжения \( s \approx 0 \) (при прохождении наведенной ЭДС ротора через ноль), что минимизирует броски тока при втягивании в синхронизм.
7. Преимущества и недостатки
Преимущества
- Компенсация реактивной мощности: При перевозбуждении СД генерирует реактивную энергию в сеть, повышая общий \( \cos \varphi \) предприятия.
- Стабильность скорости: Абсолютно жесткая механическая характеристика.
- Высокий КПД: Особенно у мощных машин, благодаря отсутствию токов намагничивания в статоре (они обеспечиваются системой возбуждения).
- Устойчивость к просадкам сети: Максимальный момент линейно зависит от напряжения, что лучше, чем квадратичная зависимость у АД.
Недостатки
- Сложность пуска: Требует специального алгоритма и оборудования.
- Склонность к качаниям: При резких изменениях нагрузки ротор может совершать затухающие колебания около синхронной скорости.
- Цена и габариты: Система возбуждения увеличивает стоимость и требует обслуживания.
8. Интересные факты о синхронных машинах
- Двойное назначение: Любой синхронный двигатель может работать как генератор, если крутить его вал внешним моментом.
- Самые мощные в мире: Самые крупные двигатели в мире (десятки мегаватт) для привода гребных винтов ледоколов и прокатных станов — синхронные.
- Синхронный компенсатор: Существует режим работы СД без нагрузки на валу, исключительно для выработки реактивной мощности и поддержания напряжения в ЛЭП.
- Часы и время: Крошечные синхронные двигатели использовались в электромеханических часах, так как их скорость идеально точна, пока стабильна частота сети.
- V-образные характеристики: Графики зависимости тока статора от тока возбуждения напоминают букву «V». Минимум тока статора соответствует \( \cos \varphi = 1 \).
- Огромный зазор: Воздушный зазор в СД может быть значительно больше, чем в АД, что делает их механически надежнее.
- Демпферная обмотка: Пусковая клетка также гасит колебания (качания) ротора при работе, выполняя роль демпфера.
9. Часто задаваемые вопросы (FAQ)
Только при изменении частоты питающего напряжения \( f \) с помощью частотного преобразователя. При прямом включении в сеть скорость неизменна.
Это аварийный режим, когда момент сопротивления на валу превышает максимальный электромагнитный момент двигателя. Ротор останавливается, а ток в статоре резко возрастает.
Изменяя ток ротора, мы управляем коэффициентом мощности (\( \cos \varphi \)). При перевозбуждении двигатель отдает реактивную энергию, разгружая сеть.
Это параметр, учитывающий индуктивное сопротивление рассеяния статора и влияние магнитного поля реакции якоря. Оно определяет перегрузочную способность машины.
В установках большой мощности (от 100 кВт до десятков МВт), не требующих частых пусков: компрессоры, насосные станции, шаровые мельницы, вентиляторы главного проветривания шахт.
Заключение
Синхронные двигатели представляют собой класс высокоэффективных электрических машин, незаменимых в энергоемких отраслях промышленности. Несмотря на сложность конструкции и пусковых операций по сравнению с асинхронными аналогами, возможность генерации реактивной мощности и строгая стабильность частоты вращения делают их безальтернативным выбором для мощных приводов непрерывного цикла. Современные системы частотного управления (ЧРП) открывают новые горизонты применения синхронных машин, устраняя недостатки прямого пуска и позволяя гибко регулировать технологические процессы.
Нормативная база
- ГОСТ IEC 60034-1-2014 «Машины электрические вращающиеся. Часть 1. Номинальные значения параметров и эксплуатационные характеристики» (Действующий стандарт, гармонизированный с международным IEC).
- ГОСТ 16264.2-2018 «Двигатели синхронные. Общие технические условия».
- ГОСТ 27471-87 «Машины электрические вращающиеся. Термины и определения».
Литература:
- Копылов И.П. «Электрические машины», Учебник для вузов. — М.: Энергоатомиздат.
- Вольдек А.И. «Электрические машины». — Л.: Энергия.
- Токарев Б.Ф. «Электрические машины». — М.: Энергоатомиздат.
Асинхронный электродвигатель (АД) — это электрическая машина переменного тока, в которой частота вращения ротора не равна (асинхронна) частоте Читать далее...
Расчет электрических цепей является основной задачей электротехники. Если в цепях постоянного тока (DC) основными параметрами являются сопротивление Читать далее...
Мощность в цепях переменного тока — это физическая величина, характеризующая скорость передачи или преобразования электрической энергии. В Читать далее...
Электрический пробой — это критическое изменение состояния вещества, при котором диэлектрик (изолятор) под воздействием сильного электрического поля теряет Читать далее...