
Содержание страницы
- 1. Конструкция и устройство
- 2. Формирование вращающегося магнитного поля
- 3. Физика процесса: Взаимодействие полей
- 4. Понятие скольжения
- 5. Сравнительная таблица типов роторов
- 6. Преимущества и недостатки асинхронных двигателей
- 7. Интересные факты об асинхронных двигателях
- 8. Часто задаваемые вопросы (FAQ)
- Заключение
Асинхронный электродвигатель (АД) — это электрическая машина переменного тока, в которой частота вращения ротора не равна (асинхронна) частоте вращения магнитного поля, создаваемого током обмотки статора. Это «рабочая лошадка» современной промышленности, на долю которой приходится, по разным оценкам, до 90% всех используемых в мире электродвигателей.
1. Конструкция и устройство
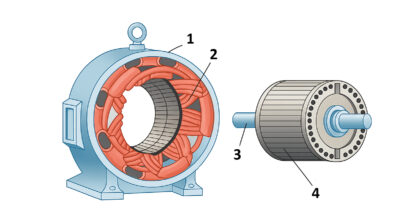
Прежде чем углубляться в физику процесса, необходимо понять, из чего состоит машина. Асинхронный двигатель, благодаря своей простоте, обладает высокой надежностью. Основными частями являются:
- Статор — неподвижная часть. Представляет собой шихтованный сердечник (набранный из листов электротехнической стали для снижения потерь на вихревые токи), в пазы которого уложены три одинаковые фазные обмотки.
- Ротор — вращающаяся часть. Также состоит из сердечника и обмотки.
Типы роторов
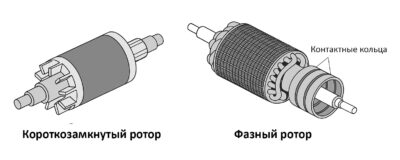
Существует два основных типа исполнения ротора, определяющих характеристики двигателя:
- Короткозамкнутый ротор (КЗР): Обмотка выполнена в виде стержней, залитых алюминием или медью и замкнутых накоротко кольцами с торцов (типа «беличья клетка»). Это наиболее массовое решение.
- Фазный ротор: Имеет полноценную трехфазную обмотку, выводы которой подключены к контактным кольцам. Это позволяет включать в цепь ротора дополнительные реостаты для регулировки пускового момента и тока.
2. Формирование вращающегося магнитного поля
Ключевой элемент работы — создание вращающегося поля без механического вращения частей статора. На статоре асинхронного двигателя расположены три одинаковые обмотки. Геометрически эти обмотки сдвинуты в пространстве статора на угол \( 120^\circ \). При подключении их к трехфазной сети переменного тока, в каждой фазе протекают синусоидальные токи, также сдвинутые по фазе на \( 120^\circ \) во времени.
Суммарный магнитный поток, создаваемый этими тремя обмотками, представляет собой вектор постоянной величины, который вращается с угловой частотой \( \omega_c \), равной угловой частоте питающей сети (для двухполюсной машины). Частота вращения поля (синхронная частота) \( n_c \) зависит от частоты сети \( f \) и числа пар полюсов \( p \):
$$ n_c = \frac{60 \cdot f}{p} $$
3. Физика процесса: Взаимодействие полей
Ротор двигателя содержит обмотку, витки которой обычно коротко замкнуты (для самого распространенного типа). Рассмотрим физику возникновения вращающего момента детально. Вращающееся магнитное поле статора пересекает проводники обмотки ротора. Согласно закону электромагнитной индукции, это индуцирует в обмотке ротора ЭДС (электродвижущую силу). Так как витки замкнуты, ЭДС вызывает протекание в них токов.
Ключевой момент: взаимодействие токов ротора с вращающимся магнитным полем статора создает электромагнитные силы \( F \), направление которых определяется по правилу левой руки (правило для двигательного режима, когда на проводник с током в магнитном поле действует сила).
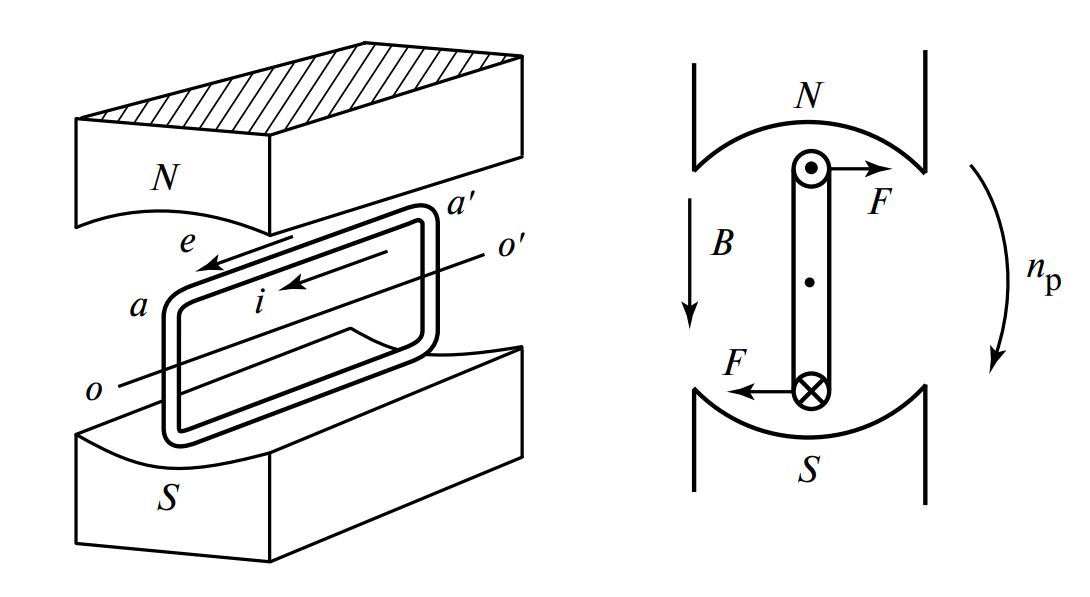
(Схема с полюсами N и S, вектором силы F и направлением токов)
В качестве иллюстрации рассмотрим Рисунок 2, на котором изображен один виток обмотки ротора и магнитное поле статора. \( N \) и \( S \) являются полюсами вращающегося магнитного поля с угловой частотой \( \omega_c \).
Для понимания процессов важно рассмотреть относительное движение. Магнитное поле как бы «набегает» на виток (вращаясь быстрее него), что физически равносильно вращению самого витка в неподвижном магнитном поле в направлении, противоположном истинному вращению поля. ЭДС, наводимая в витке, в этом случае определяется по правилу правой руки (правило для генераторного режима, определяющее направление тока).
На Рисунке 1 показаны:
- Направления ЭДС, наводимых в проводниках витка (обозначены точками и крестиками в сечениях проводников \( a \) и \( a’ \), либо аналогичными маркерами).
- Ток витка \( i \), возникший под действием этой ЭДС.
- Электромагнитные силы \( F \), действующие на виток.
- Частота вращения витка ротора \( n_p \) (или \( n_r \) в современной нотации).
Под действием пары сил \( F \) виток (и весь ротор) начнет вращаться с частотой вращения \( n_p \). При этом направление вращения ротора совпадает с направлением вращения поля статора. Однако, частота вращения ротора всегда меньше частоты вращения магнитного поля статора \( n_c \) (синхронной частоты), т.е. \( n_p < n_c \).
4. Понятие скольжения
Разность между частотами вращения поля статора и ротора является фундаментальной характеристикой и описывается параметром скольжение (\( s \)):
$$ s = \frac{n_c — n_p}{n_c} $$
или в процентах:
$$ s = \frac{n_c — n_p}{n_c} \cdot 100\% $$
Где:
- \( n_c \) — синхронная частота вращения поля статора.
- \( n_p \) — реальная частота вращения ротора.
Обычно номинальное скольжение \( s_{nom} \) для двигателей общепромышленного назначения не превышает 2—6 %. Именно из-за того, что частота вращения ротора \( n_p \) никогда не совпадает с частотой вращения магнитного поля \( n_c \), двигатель и называется асинхронным.
5. Сравнительная таблица типов роторов
Ниже приведено сравнение двух основных конструкций роторов, применяемых в асинхронных машинах.
| Характеристика | Короткозамкнутый ротор (КЗР) | Фазный ротор (с контактными кольцами) |
|---|---|---|
| Конструкция | Простая, «беличья клетка», нет подвижных контактов | Сложная, есть обмотки, щетки и контактные кольца |
| Стоимость | Низкая | Высокая (на 1.5–2 раза дороже аналога с КЗР) |
| Пусковой момент | Средний (ограничен физикой процесса) | Максимальный (регулируется реостатом) |
| Пусковой ток | Высокий (5–7 номинальных) | Низкий (регулируется) |
| Обслуживание | Минимальное (только подшипники) | Требует регулярной замены щеток и обслуживания колец |
| Применение | Насосы, вентиляторы, станки, конвейеры | Краны, лифты, центрифуги, дробилки (тяжелый пуск) |
6. Преимущества и недостатки асинхронных двигателей
Преимущества:
- Простота и дешевизна: Отсутствие коллектора делает их самыми дешевыми в производстве.
- Надежность: При правильной эксплуатации могут работать десятилетиями без ремонта.
- Прямое подключение: Возможность включения напрямую в сеть переменного тока (для небольших мощностей).
- Жесткая механическая характеристика: Обороты мало меняются при изменении нагрузки.
Недостатки:
- Пусковые токи: При прямом пуске ток в 5-7 раз превышает номинальный, что вызывает просадку напряжения в сети.
- Сложность регулировки скорости: Для эффективного управления скоростью требуется дорогостоящий частотный преобразователь (ПЧ).
- cos φ: Потребляют реактивную мощность из сети, что требует установки компенсирующих устройств (конденсаторных установок).
- Чувствительность к напряжению: Вращающий момент пропорционален квадрату напряжения (\( M \sim U^2 \)), поэтому даже небольшое падение напряжения резко снижает тяговую способность.
7. Интересные факты об асинхронных двигателях
- Электромобили: Название компании Tesla отсылает к изобретателю двигателя, а в ранних моделях (Tesla Roadster, Model S) использовались именно модифицированные асинхронные двигатели, в отличие от большинства конкурентов, использующих синхронные магниты.
- КПД: Современные двигатели класса IE4 и IE5 (Super Premium Efficiency) достигают КПД 96-97%.
- Рекуперация: Если разогнать асинхронный двигатель внешней силой выше синхронной скорости (\( s < 0 \)), он автоматически переходит в генераторный режим, возвращая энергию в сеть.
- Эффект вытеснения тока: В глубоких пазах ротора при пуске ток вытесняется на поверхность стержней, что автоматически увеличивает активное сопротивление и пусковой момент.
- Самый большой АД: Существуют гиганты мощностью свыше 100 МВт, используемые для привода компрессоров на газопроводах и в аэродинамических трубах.
- Однофазный режим: Трехфазный двигатель может работать от одной фазы (с потерей мощности), если раскрутить его вручную или использовать фазосдвигающий конденсатор.
- Мировой масштаб: Асинхронные двигатели потребляют более 40% всей вырабатываемой в мире электроэнергии.
8. Часто задаваемые вопросы (FAQ)
Заключение
Асинхронный двигатель с короткозамкнутым ротором остается непревзойденным лидером в электроприводе благодаря сочетанию гениальной простоты конструкции и физической эффективности. Понимание принципов его работы — взаимодействия вращающегося магнитного поля и индуцированных токов — является базой для любого инженера-электрика. Несмотря на появление новых типов двигателей (вентильных, синхронных реактивных), асинхронная машина, особенно в паре с частотным управлением, будет доминировать в промышленности еще долгие годы.
Нормативная база
- ГОСТ 31606-2024 — Машины электрические вращающиеся. Двигатели асинхронные мощностью от 0,12 до 400 кВт включительно. Общие технические требования. (Введен в действие с 01.06.2024). Основной документ.
- ГОСТ IEC 60034-1-2014 — Машины электрические вращающиеся. Часть 1. Номинальные данные и характеристики. (IDT международному стандарту IEC 60034-1:2010).
- ГОСТ 27471-87 — Машины электрические вращающиеся. Термины и условные обозначения.
- ГОСТ 2582-2013 — Машины электрические вращающиеся тяговые. Общие технические условия.
Рекомендуемая литература:
- Копылов И.П. «Математическое моделирование электрических машин», 2020.
- Вольдек А.И., Попов В.В. «Электрические машины. Машины переменного тока», Питер, 2010.
- Беспалов В.Я., Мощинский Ю.А. «Электрические машины», учебник для вузов.
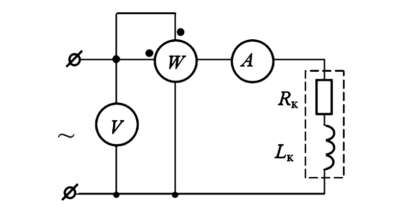
Реальные индуктивные элементы в электротехнических цепях никогда не являются идеальными. Они всегда обладают активным сопротивлением провода обмотки, Читать далее...
Электрическая емкость — это фундаментальная физическая характеристика, которая определяет способность проводника или системы проводников накапливать электрический заряд. Читать далее...

Газообразные диэлектрики — это класс электроизоляционных материалов, находящихся в газообразном агрегатном состоянии, основной функцией которых является предотвращение протекания Читать далее...
Спектральный (частотный) метод — это фундаментальный подход в теории электрических цепей, предназначенный для анализа их реакции на непериодические, Читать далее...