Содержание страницы
- 1. Устройство и конструктивные особенности электромагнитов
- 2. Классификация электромагнитов
- 3. Основные параметры и характеристики
- 4. Физика электромагнитной тяговой силы: От энергии к механике
- 5. Анализ тяговых характеристик (Статика)
- 6. Динамика: Рабочий процесс во времени
- 7. Поляризованные электромагниты: Чувствительность
- 8. Электромагниты переменного тока: Борьба с вибрацией
- 9. Сравнительный анализ: Электромагниты переменного (AC) и постоянного (DC) тока
- 10. Управление динамикой: Ускорение и замедление срабатывания
- 11. Интересные факты об электромагнитах
- 12. FAQ: Часто задаваемые вопросы по эксплуатации
- Заключение
Электромагнит — это электромеханическое устройство, состоящее из токопроводящей обмотки (катушки) и ферромагнитного сердечника (магнитопровода), которое приобретает свойства магнита только при прохождении через него электрического тока.
Однако настоящий прорыв, позволивший создать электромагнит как устройство, совершил английский инженер Уильям Стерджен в 1824 году. Он изогнул стержень из мягкого железа в форме подковы и обмотал его изолированным проводом. При пропускании тока железо намагничивалось и могло удерживать груз, превышающий его собственный вес. Позже американский физик Джозеф Генри усовершенствовал конструкцию, применив многослойную обмотку из изолированного провода (шелковую изоляцию), что позволило создавать мощные поля при относительно слабых токах.
Сегодня электромагнитные процессы лежат в основе принципа действия колоссального количества электрических аппаратов. Функционирование реле, контакторов, пускателей и автоматических выключателей невозможно без явления возникновения электромагнитной тяговой силы.
Представьте электромагнит как «электрическую мышцу». Ток, протекающий по проводам — это нервный импульс. Как только импульс поступает, мышца (магнитное поле) напрягается и совершает механическую работу — притягивает кость (якорь). Как только ток исчезает, мышца расслабляется. Вся магия электрических аппаратов строится на этом управляемом сокращении.
1. Устройство и конструктивные особенности электромагнитов
1.1. Базовая архитектура магнитной системы
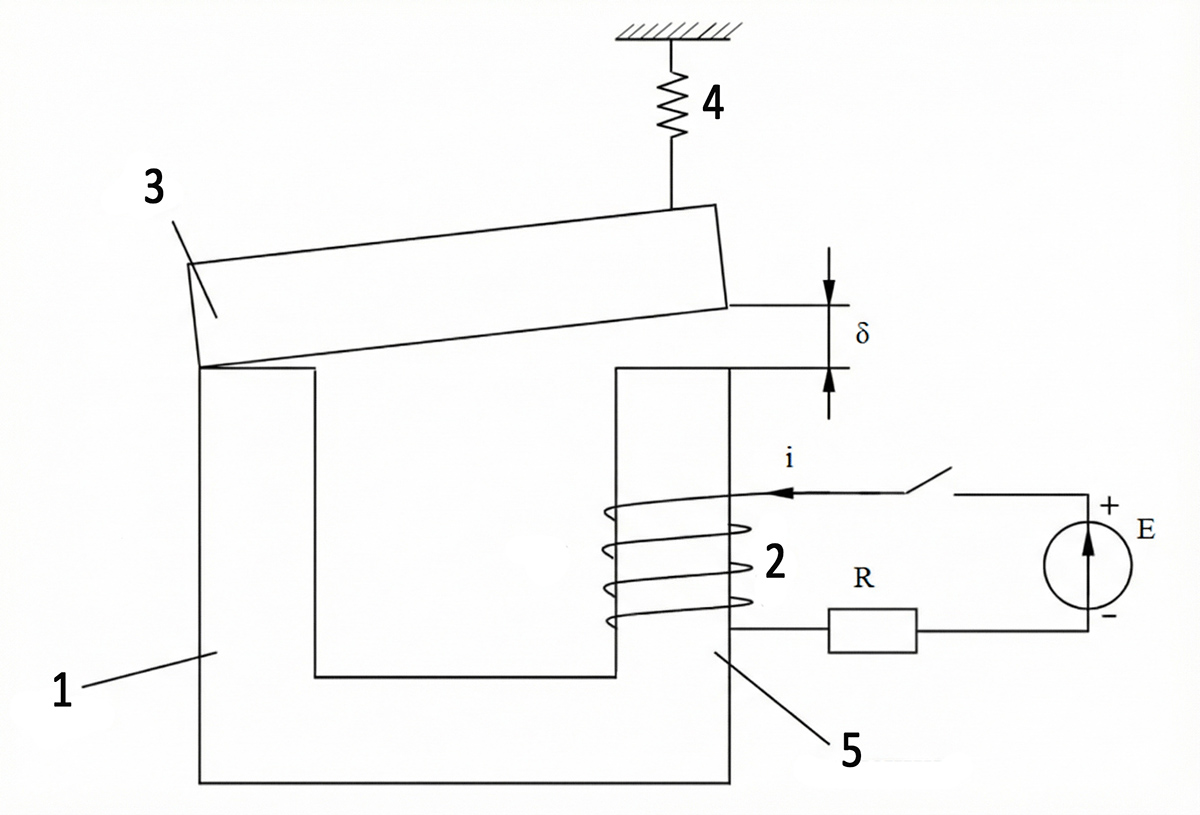
Любой электромагнитный механизм представляет собой совокупность электрической и магнитной цепей. Магнитная цепь большинства промышленных электромагнитов содержит четыре ключевых элемента:
- Намагничивающая катушка (обмотка): Источник магнитодвижущей силы (МДС). Она преобразует электрический ток в магнитный поток.
- Якорь: Подвижная часть магнитопровода, которая совершает механическое движение, притягиваясь к неподвижной части. Именно к якорю крепятся контакты или исполнительные механизмы.
- Ярмо (сердечник): Неподвижная часть магнитной системы, по которой замыкается магнитный поток.
- Воздушные зазоры: Пространство между якорем и ярмом. Это «рабочая зона», где энергия магнитного поля преобразуется в механическую работу перемещения.
Материалы для магнитопровода выбираются с высокой магнитной проницаемостью (магнитомягкие материалы), такие как электротехническая сталь, пермаллой или ферриты, чтобы минимизировать потери энергии на создание магнитного поля.
1.2. Сфера применения
Сила тяги электромагнитов используется повсеместно:
- В коммутационных аппаратах: реле, контакторы, магнитные пускатели.
- В защитных устройствах: автоматические выключатели (электромагнитные расцепители).
- В исполнительных механизмах: приводы клапанов (соленоидные клапаны), муфты сцепления и тормозные системы станков, подъемные электромагниты, дистанционные переключатели и фиксаторы.
2. Классификация электромагнитов
Многообразие задач, решаемых с помощью электромагнитов, породило огромное количество их конструктивных исполнений. Классификация может быть выполнена с использованием множества признаков.
2.1. По роду тока и характеру действия сил
- Нейтральные электромагниты постоянного тока: Сила тяги зависит только от величины тока, но не от его направления. При смене полярности якорь все равно притягивается. Они надежны, создают мощное усилие.
- Поляризованные электромагниты: В их конструкции есть постоянный магнит. Направление движения якоря (или его удержание) зависит от направления тока в обмотке. Это высокочувствительные устройства.
- Электромагниты переменного тока: Питаются от сети промышленной частоты. Имеют специфические проблемы (вибрация), которые решаются экранированием (об этом ниже).
- Электромагниты, питающиеся выпрямленным током: Используются там, где нужна характеристика магнита постоянного тока, но доступна только сеть переменного тока (используют диодные мосты).
2.2. По способу включения катушек
Это критически важный параметр, определяющий поведение аппарата в цепи.
| Тип обмотки | Особенности конструкции | Принцип работы |
|---|---|---|
| Последовательная (токовая) | Малое число витков (\(W\)), провод большого сечения. | Включается последовательно с нагрузкой. Ток в катушке \(I\) определяется нагрузкой потребителя, а не самой катушкой. Катушка должна выдерживать полный ток нагрузки. Работает при заданном токе. |
| Параллельная (напряжения) | Большое число витков (\(W\)), провод малого сечения. | Включается параллельно источнику питания. Работает при заданном напряжении. Ток \(I\) определяется законом Ома для самой катушки (\(I = U/Z_k\)) и практически не зависит от внешней цепи. |
2.3. По режиму работы (длительности)
Выделяют:
- Продолжительный режим: Обмотка может находиться под током бесконечно долго, температура не превысит допустимую.
- Кратковременный режим: Включение на короткое время, за которое аппарат не успевает нагреться до установившейся температуры, после чего следует пауза до полного остывания.
- Повторно-кратковременный режим (ПВ): Работа циклами «работа-пауза». Характеризуется параметром ПВ (Продолжительность Включения) в процентах (например, 15%, 25%, 40%).
2.4. По быстродействию и характеру движения
- Быстродействие: Нормальные, замедленные (с медными гильзами), быстродействующие (форсированные).
- Функции: Тянущие, толкающие, поворотные, удерживающие, ударные.
- Характер движения якоря:
- Клапанный тип (поворотный): Якорь вращается вокруг оси. Характерно для реле.
- Соленоидный тип (прямоходный): Якорь втягивается внутрь катушки. Характерно для контакторов и приводов.
2.5. Конструкция стопа и якоря
Форма взаимодействующих поверхностей (полюсов) определяет форму тяговой характеристики (зависимость силы от расстояния).
- Плоский стоп: Резкое возрастание силы в конце хода.
- Конический стоп (или усеченный конус): Позволяет получить более равномерную тяговую характеристику на длинном ходу.
- Сферическая форма: Для самоцентрирующихся систем.
3. Основные параметры и характеристики
- Номинальное тяговое усилие (\(F_{nom}\)): Сила, которую развивает магнит при номинальных условиях.
- Номинальный ход (\(\delta_{nom}\)): Максимальное рабочее перемещение якоря.
- Номинальная удерживающая сила: Сила при полностью притянутом якоре (она всегда значительно больше тяговой силы при разомкнутом зазоре).
- Времена срабатывания (\(t_{on}\)) и возврата (\(t_{off}\)): Динамические параметры.
- Номинальная потребляемая мощность (\(P\)): Важна для расчета источников питания и теплоотвода.
3.1. Ключевые графические характеристики
Анализ работы ЭМ невозможен без рассмотрения функциональных зависимостей:
- Статическая тяговая характеристика \(F = f(\delta)\): Зависимость электромагнитной силы от величины зазора при установившемся токе.
- Динамическая тяговая характеристика \(F_д = f(\delta)\): То же, но с учетом изменения тока в процессе движения якоря (учитывает индуктивные эффекты).
- Механическая характеристика \(F_{пр} = f(\delta)\): Зависимость сил сопротивления (пружины, трение, вес контактов), которые магнит должен преодолеть.
- Ток в обмотке во времени \(i = f(t)\): Кривая, показывающая процесс нарастания тока, «яму» при движении якоря и установившийся режим.
- Магнитный поток от тока \(\Phi = f(i)\): Кривая намагничивания (петля гистерезиса).
Далее мы подробно разберем физику возникновения тяговой силы и математический аппарат для ее расчета.
4. Физика электромагнитной тяговой силы: От энергии к механике
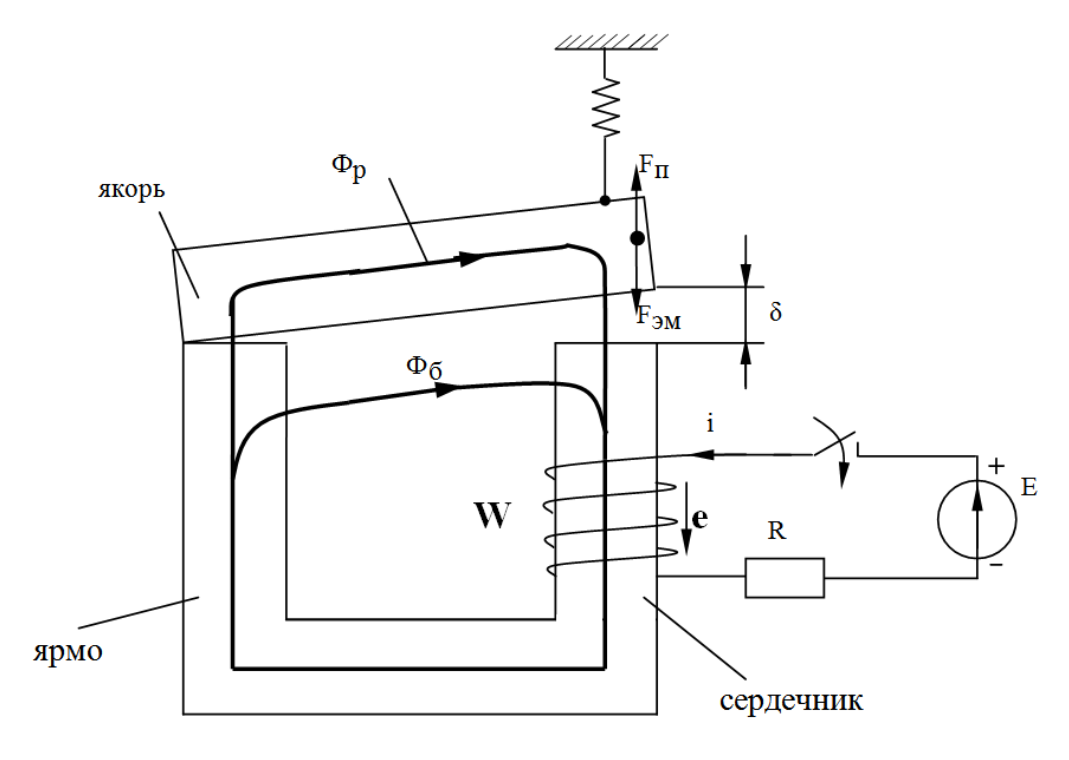
Рассмотрим процесс преобразования энергии в клапанном электромагните постоянного тока.
Магнитная цепь (см. Рисунок 2) включает в себя ферромагнитный сердечник, якорь и воздушный зазор. Примем допущение, что поле в рабочем зазоре равномерное, а сталь магнитопровода не насыщена.
4.1. Уравнение энергетического баланса
Согласно закону сохранения энергии, энергия, поступающая от электрического источника за бесконечно малый промежуток времени \(dt\), расходуется на три процесса:
- Тепловые потери (нагрев провода, закон Джоуля-Ленца).
- Изменение энергии, запасенной в магнитном поле.
- Совершение механической работы по перемещению якоря.
Где:
\(U i dt\) — полная энергия от источника питания;
\(i^2 R dt\) — потери на нагрев обмотки;
\(dW_M\) — приращение магнитной энергии поля;
\(F_{EM} d\delta\) — механическая работа силы \(F_{EM}\) на перемещении \(d\delta\).
4.2. Принцип виртуальных перемещений
Для вывода формулы силы используем фундаментальное соотношение электротехники: напряжение источника уравновешивается падением напряжения и ЭДС самоиндукции \(e = -d\psi/dt\). Уравнение напряжения: \(U = iR + d\psi/dt\). Умножив обе части на \(i dt\), получаем:
Сравнивая это с уравнением баланса, находим, что сумма изменения магнитной энергии и механической работы равна изменению потокосцепления:
Здесь применяется физическая хитрость (принцип виртуальных перемещений). Представим, что перемещение якоря \(d\delta\) происходит настолько быстро, что потокосцепление \(\psi\) не успевает измениться (в силу инерционности электромагнитных процессов, \(d\psi = 0\)). В этом случае внешняя энергия не поступает, и механическая работа совершается исключительно за счет убыли энергии магнитного поля:
Знак минус в формуле не является ошибкой. Он указывает вектор направления силы. Сила всегда направлена в сторону уменьшения магнитного сопротивления цепи, то есть в сторону уменьшения воздушного зазора \(\delta\). Система стремится к состоянию с минимальной потенциальной энергией, «схлопывая» зазор.
4.3. Вывод формулы Максвелла
Энергия магнитного поля \(W_M\) в линейной системе определяется как \(W_M = \frac{1}{2} L i^2\) или через магнитную проводимость \(G_\delta\):
Где \(Iw\) — магнитодвижущая сила (МДС, Ампер-витки), а проводимость зазора \(G_\delta\) для плоского поля равна:
Дифференцируя энергию по зазору \(\delta\), получаем знаменитую формулу Максвелла для тяговой силы, которая используется инженерами во всем мире для экспресс-расчетов:
Где:
\(B\) — магнитная индукция в зазоре (Тесла);
\(S\) — площадь полюса (м²);
\(\mu_0 = 4\pi \cdot 10^{-7}\) Гн/м — магнитная постоянная.
5. Анализ тяговых характеристик (Статика)
Понимание зависимости силы от расстояния (хода якоря) позволяет правильно подобрать тип магнита под задачу. На Рисунке 3 представлены три фундаментальных типа характеристик.
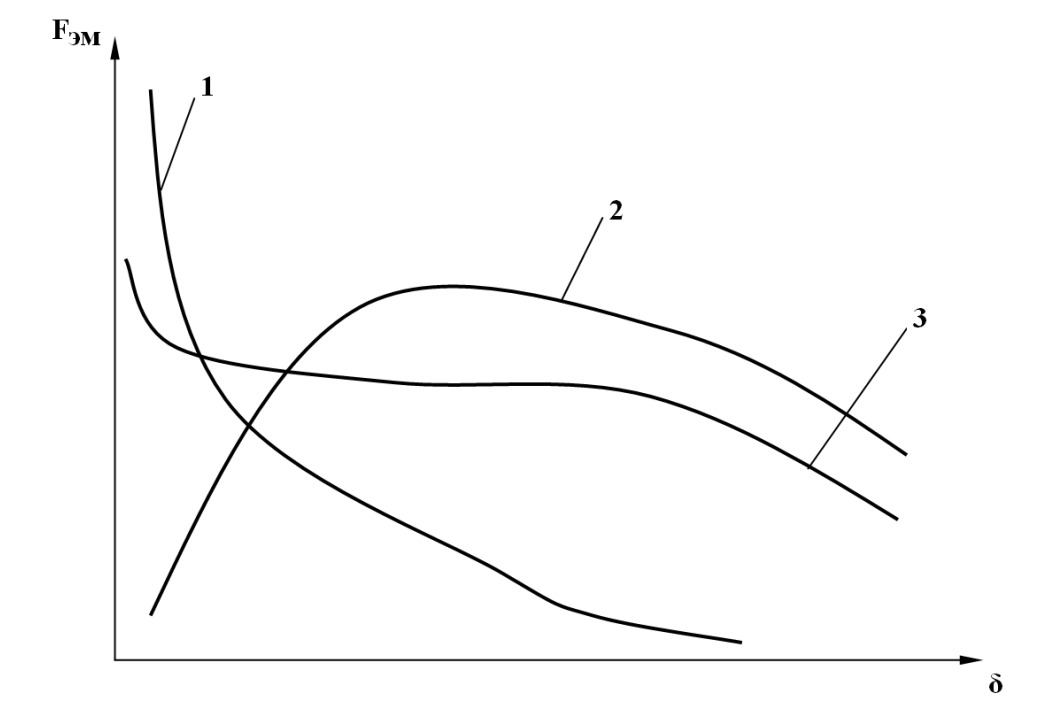
- Кривая 1 (Клапанный тип): Жесткая гиперболическая характеристика (\(F \sim 1/\delta^2\)). Огромная сила в конце хода (при прижиме), но очень слабая в начале. Идеально для реле и контакторов, где нужно сильное контактное нажатие.
- Кривая 2 (Соленоидный тип): Втягивающийся сердечник. Характеристика более пологая, с максимумом в середине катушки. Применяется там, где нужно тянуть груз на большом расстоянии (приводы тормозов, длинноходовые клапаны).
- Кривая 3 (Броневой тип): Специальная конструкция стопа (часто коническая), позволяющая выровнять усилие и получить мощную тягу на всем пути движения.
6. Динамика: Рабочий процесс во времени
Работа электромагнита — это не мгновенное событие, а сложный переходный процесс, который можно разделить на четыре фазы (см. Рисунок 4). Анализ этого процесса критичен для оценки быстродействия аппарата.
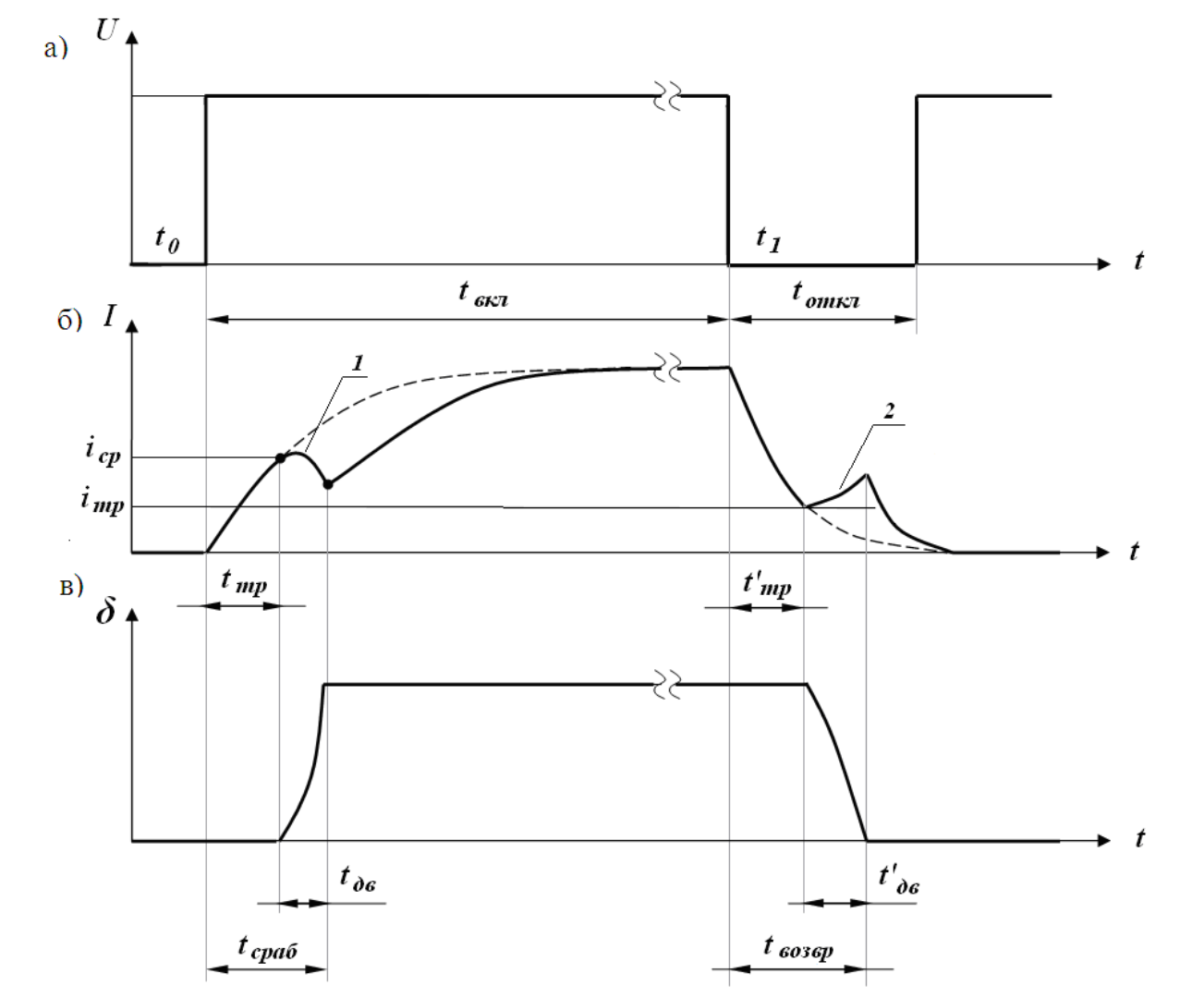
Фаза 1: Трогание (\(0 \dots t_{tr}\))
При подаче напряжения ток нарастает экспоненциально: \(i = \frac{U}{R}(1 — e^{-t/\tau})\). Якорь стоит на месте, так как электромагнитная сила \(F_{EM}\) еще меньше силы возвратной пружины \(F_{prud}\). Постоянная времени \(\tau = L/R\) определяет скорость нарастания. Эта фаза — «чистая потеря» времени.
Фаза 2: Движение и эффект «токовой ямы» (\(t_{tr} \dots t_{cp}\))
Как только \(F_{EM} > F_{prud}\), якорь начинает движение. Здесь происходит самое интересное физическое явление. Из формулы напряжения:
Появляется слагаемое \(i \frac{dL}{dt}\). Поскольку при движении якоря зазор уменьшается, индуктивность \(L\) резко растет (\(dL/dt > 0\)). Это слагаемое работает как противо-ЭДС движения (аналогично генератору). Оно настолько велико, что ток в катушке начинает уменьшаться, несмотря на подключенное напряжение. На графике тока образуется характерный провал («седловина» или «клык»).
Представьте, что вы толкаете тележку (ток) в гору. Внезапно гора становится круче (якорь поехал, индуктивность растет). Ваша скорость (величина тока) временно падает из-за возросшей нагрузки, пока вы не адаптируетесь.
Фаза 3: Установившийся режим
Якорь ударяется о стоп. Индуктивность перестает меняться (\(dL/dt = 0\)). Ток снова начинает расти экспоненциально, но уже с новой, гораздо большей постоянной времени (так как \(L\) при замкнутом зазоре максимальна), стремясь к значению \(I_{ust} = U/R\).
Фаза 4: Отключение
При размыкании цепи энергия, запасенная в магнитном поле (\(L I^2 / 2\)), не может исчезнуть мгновенно. Она вызывает перенапряжение на контактах (дугу) или замыкается через разрядный диод/резистор. Время отпускания зависит от того, насколько быстро рассеется эта энергия и исчезнет остаточная намагниченность.
7. Поляризованные электромагниты: Чувствительность
Особый класс устройств — поляризованные электромагниты (ПЭМ). Их главное отличие — наличие встроенного постоянного магнита. Это не просто «добавка», это принципиально меняет физику работы.
7.1. Принцип действия (Суперпозиция потоков)
В магнитной цепи (Рисунок 5) действуют два потока:
1. \(\Phi_P\) — поток поляризации от постоянного магнита (существует всегда).
2. \(\Phi_U\) — рабочий поток от обмотки управления.
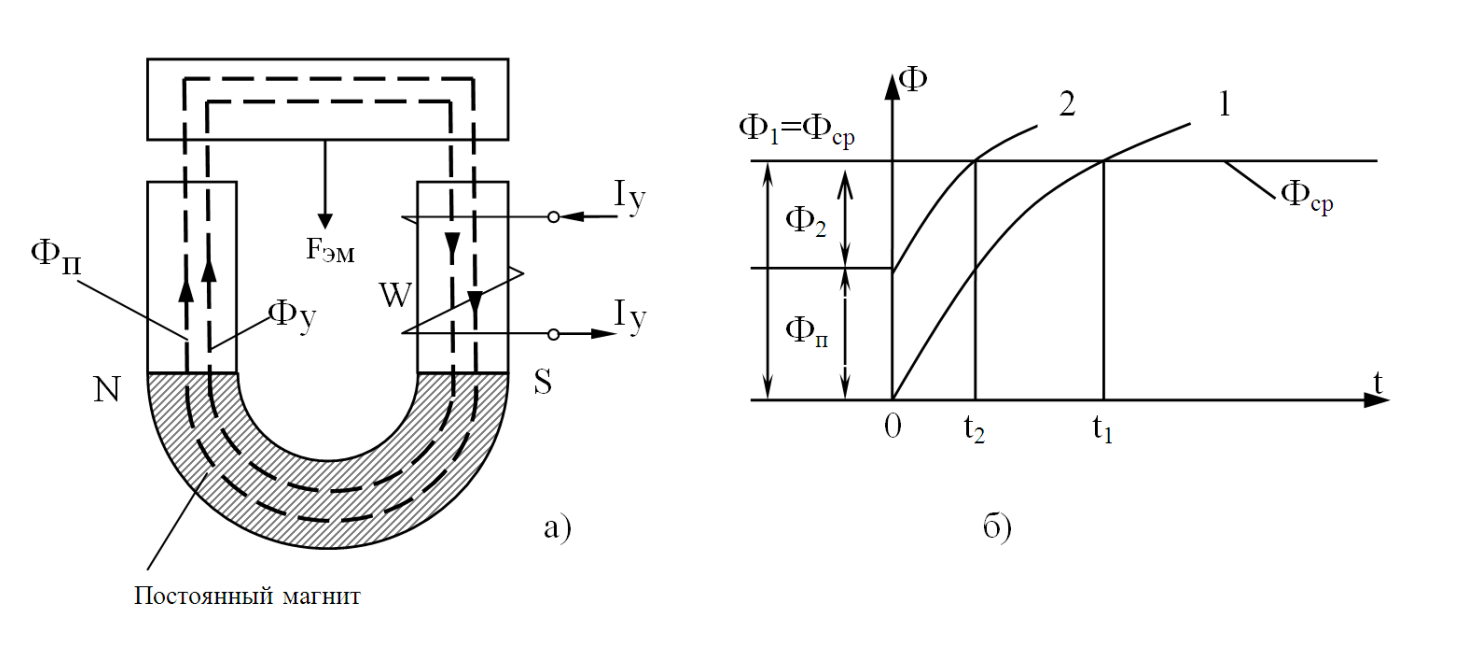
Результирующая сила пропорциональна квадрату суммы потоков: \(F \sim (\Phi_P \pm \Phi_U)^2\).
Благодаря квадратичной зависимости, даже малый управляющий поток \(\Phi_U\), складываясь с мощным потоком \(\Phi_P\), дает огромный прирост силы. Это обеспечивает высочайшую чувствительность (коэффициент усиления).
7.2. Уникальные свойства ПЭМ
| Свойство | Описание и преимущество |
|---|---|
| Направленность действия | В отличие от нейтральных ЭМ, поляризованные реагируют на полярность сигнала. Если ток течет в одну сторону — потоки складываются (срабатывание). В другую — вычитаются (блокировка). |
| Бистабильность | Возможность создания реле с «памятью». Якорь удерживается в крайних положениях только за счет постоянного магнита, потребляя энергию только в момент переключения (импульсное управление). |
| Сверхбыстродействие | Время срабатывания составляет 1–3 мс (против 10–50 мс у обычных). Это достигается за счет отсутствия массивных деталей и предварительного подмагничивания стали. |
8. Электромагниты переменного тока: Борьба с вибрацией
Работа электромагнитов в цепях переменного тока (AC) кардинально отличается от цепей постоянного тока (DC). Здесь появляется с проблема, которой нет в DC-системах: периодическое прохождение тока через ноль.
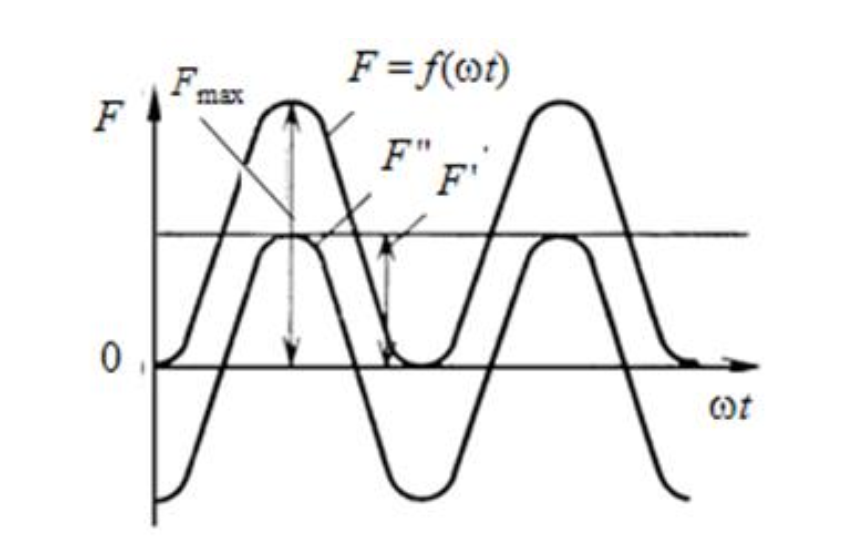
8.1. Математика пульсации силы
Если подать на катушку переменный ток \(i = I_{max} \sin(\omega t)\), магнитный поток также будет изменяться по синусоидальному закону \(\Phi = \Phi_{max} \sin(\omega t)\). Подставим это в формулу Максвелла:
Используя тригонометрическое тождество \(\sin^2 \alpha = \frac{1 — \cos 2\alpha}{2}\), получаем уравнение динамики силы:
Сила тяги пульсирует с двойной частотой (для сети 50 Гц частота пульсаций составляет 100 Гц).
Дважды за период (каждые 10 мс) мгновенное значение силы падает до абсолютного нуля.
В моменты, когда сила \(F(t)\) становится меньше силы возвратной пружины, якорь пытается отпасть. Через мгновение сила снова растет, и якорь снова притягивается. Это вызывает удары якоря о сердечник — возникает характерное гудение («жужжание») и вибрация, что приводит к разбиванию контактных поверхностей и наклепу.
8.2. Решение проблемы: Короткозамкнутый виток (Экран)
Для устранения вибрации применяется гениальное по своей простоте решение — расщепление фазы. На торце сердечника делается пропил, охватывающий 60–80% площади полюса, и на эту часть надевается медное или латунное кольцо (короткозамкнутый виток, см. Рисунок 7).
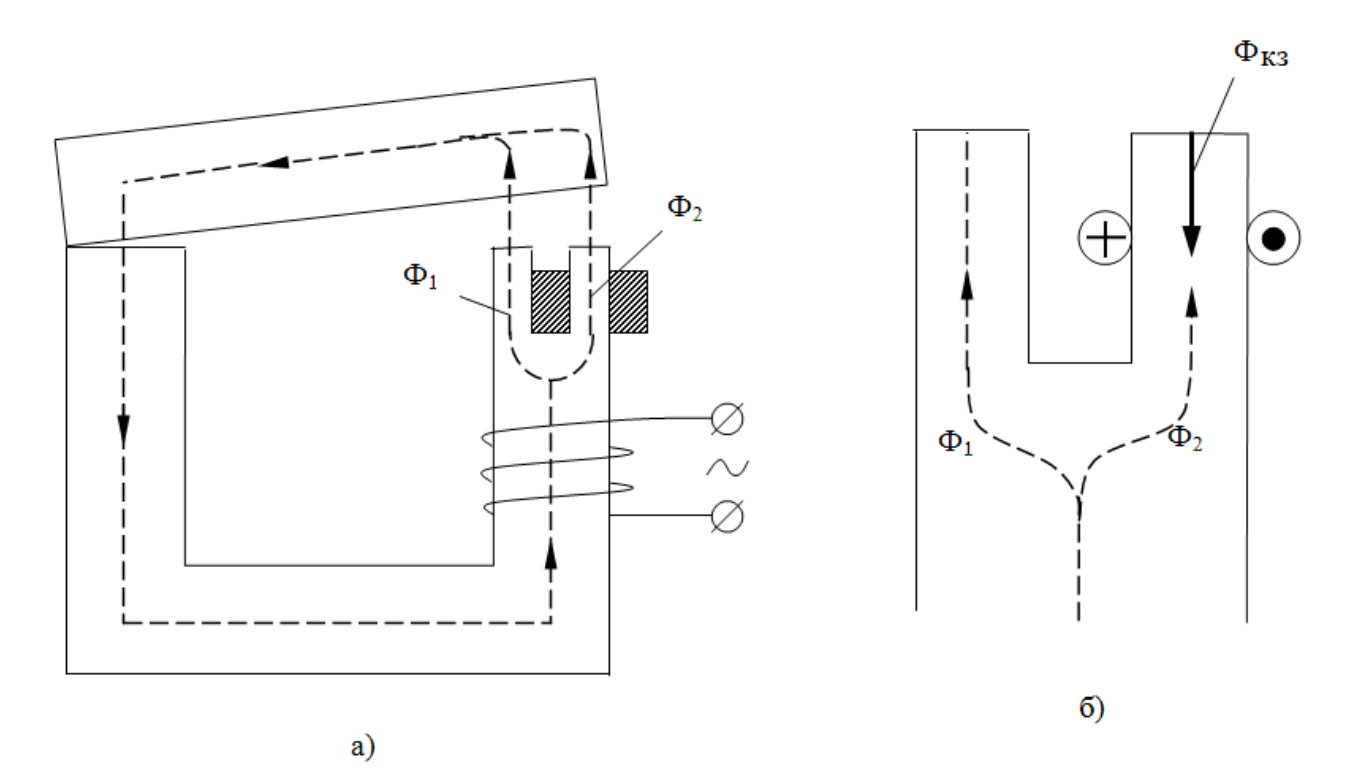
Физика процесса:
- Переменный поток \(\Phi\), проходя через виток, наводит в нем мощную ЭДС и ток (как во вторичной обмотке трансформатора, замкнутой накоротко).
- Согласно правилу Ленца, магнитное поле этого тока препятствует изменению основного потока.
- В результате поток \(\Phi_2\), пронизывающий виток, отстает по фазе от потока \(\Phi_1\) в неэкранированной части. Угол сдвига обычно составляет \(\varphi \approx 60^\circ \dots 80^\circ\).
Поскольку полная сила тяги складывается из двух сил, сдвинутых во времени (\(F_{\Sigma} = F_1 + F_2\)), их сумма никогда не падает до нуля. Минимум результирующей силы всегда больше силы пружины, что обеспечивает тихое и надежное удержание.
Представьте двух грузчиков, несущих бревно. Если они шагают в ногу (синхронно), бревно подпрыгивает при каждом шаге. Короткозамкнутый виток заставляет второго грузчика идти «не в ногу» (со сдвигом). Когда один опускает плечо, другой его поднимает. В итоге бревно (якорь) движется плавно, без тряски.
9. Сравнительный анализ: Электромагниты переменного (AC) и постоянного (DC) тока
Различия между AC и DC системами выходят далеко за рамки источника питания; они диктуют конструкцию магнитопровода, материалы и логику защиты. Ниже представлена таблица сравнения.
| Критерий сравнения | Электромагниты постоянного тока (DC) | Электромагниты переменного тока (AC) |
|---|---|---|
| 1. Закон формирования тока (Физика процесса) |
Действует классический закон Ома: \(I = U / R\). Величина установившегося тока ограничивается исключительно активным сопротивлением обмотки \(R\). Индуктивность \(L\) влияет только на скорость нарастания тока в переходном режиме, но не на его конечное значение. |
Действует закон Ома для цепи переменного тока: \(I = U / Z\). Ток ограничивается полным сопротивлением (импедансом) \(Z = \sqrt{R^2 + (\omega L)^2}\). Поскольку реактивное сопротивление \(X_L = \omega L\) обычно намного больше активного (\(\omega L \gg R\)), ток определяется главным образом индуктивностью системы. |
| 2. Пусковой ток (При включении) |
Отсутствует бросок тока. При подаче напряжения ток нарастает плавно по экспоненте \(i = I_{ust}(1 — e^{-t/\tau})\). Максимальное значение тока равно номинальному. Это щадящий режим для источника питания, но он затягивает время срабатывания. |
Мощный пусковой бросок.В момент включения, когда якорь разомкнут (зазор \(\delta\) велик), индуктивность \(L\) минимальна. Следовательно, сопротивление \(Z\) мало, и по катушке протекает ток, в 5–15 раз превышающий номинальный. По мере втягивания якоря индуктивность растет, и ток падает до рабочего значения. |
| 3. Влияние положения якоря на ток (Безопасность) |
Ток неизменен. Независимо от того, находится ли якорь в начале хода, в середине или прижат к стопу, величина тока \(I\) остается постоянной. Преимущество: Если механизм заклинит (например, из-за ржавчины или мусора) и якорь не дойдет до конца, катушка не перегреется и не сгорит. |
Ток жестко зависит от зазора. \(I \sim 1/L \sim \delta\). Чем больше зазор, тем больше ток. Опасность аварии: Если якорь заклинит в промежуточном положении («недовключение»), индуктивное сопротивление не вырастет до расчетного, и по катушке будет длительно протекать пусковой ток. Изоляция сгорит за 10–30 секунд. Требуется тепловая защита. |
| 4. Характер тяговой силы | Стабильное усилие. Сила \(F_{em}\) постоянна во времени. Она определяется МДС \((Iw)^2\) и плавно нарастает по мере уменьшения зазора. Тяговая характеристика легко регулируется и предсказуема. |
Пульсирующее усилие. Сила изменяется от нуля до максимума с двойной частотой сети (100 Гц). Среднее значение силы при тех же габаритах примерно в 2 раза меньше, чем у DC аналогов (из-за того, что действующее значение тока меньше амплитудного). |
| 5. Акустический комфорт | Абсолютно бесшумная работа. Единственный звук — это удар металла о металл в момент срабатывания. Удержание происходит без звука. |
Характерное гудение. Даже при наличии короткозамкнутого витка (экрана) присутствует микровибрация («зуммерит»). Со временем, при ослаблении пружин или перекосе якоря, гудение может усиливаться до сильного шума. |
| 6. Материалы и технология | Сплошной (массивный). Изготавливается из цельного куска магнитомягкой стали (Ст3, электротехническое железо). Причина: Магнитный поток постоянен, вихревые токи не наводятся, перемагничивания нет. Конструкция механически очень прочная, срок службы — миллионы циклов. |
Шихтованный (слоистый). Набирается из тонких (0.35–0.5 мм) изолированных пластин электротехнической стали (как трансформатор). Причина: Переменный поток вызывает мощные потери на гистерезис и вихревые токи. Массивный сердечник раскалился бы мгновенно («индукционная печь»).Минус: Конструкция менее жесткая, заклепки со временем разбалтываются от вибрации. |
| 7. Тепловой баланс | Потери только в меди обмотки (\(P = I^2 R\)). Железо не греется. |
Потери в меди + Потери в стали. Сердечник нагревается из-за перемагничивания (гистерезис) и вихревых токов. Общий нагрев аппарата выше. |
| 8. Специфические детали | Часто требуется немагнитная прокладка (штифт) на якоре, чтобы исключить «залипание» от остаточной намагниченности после отключения тока. | Обязательно наличие короткозамкнутого витка (экрана) на полюсе для расщепления фазы магнитного потока и устранения вибрации в точках перехода тока через ноль. |
| 9. Область применения | Ответственные механизмы, требующие высокой частоты включений, тяжелые условия работы, крановое оборудование, высоковольтные выключатели, прецизионная автоматика. | Массовые общепромышленные пускатели, бытовая техника, насосы, вентиляция. Там, где доступна только сеть переменного тока и не требуется прецизионная надежность. |
10. Управление динамикой: Ускорение и замедление срабатывания
В промышленных системах автоматики естественная постоянная времени электромагнита (\(\tau\)) часто не соответствует требованиям технологического процесса. В одних случаях (например, в системах аварийной защиты) требуются миллисекундные реакции, недостижимые при стандартном включении. В других — необходима задержка на отпускание для предотвращения «дребезга» контактов или создания временных интервалов. Инженерное решение этих задач сводится к манипулированию параметрами \(L\) (индуктивность) и \(R\) (активное сопротивление) в дифференциальном уравнении переходного процесса.
10.1. Методы ускорения срабатывания (Форсировка)
Физический смысл форсировки заключается в увеличении скорости нарастания тока \(di/dt\) в начальный момент времени \(t=0\). Из уравнения напряжений \(U = iR + L(di/dt)\) следует, что в начальный момент (когда \(i=0\)) скорость нарастания равна:
Следовательно, единственный способ ускорить старт — повысить прикладываемое напряжение \(U\), сохранив при этом установившееся значение тока \(I_{ust}\) безопасным для катушки.
А. Метод добавочного сопротивления (Балластная схема)
Это классическое решение для крановых тормозных электромагнитов и мощных контакторов. Катушка перематывается на меньшее напряжение (меньше витков \(W\), толще провод), что снижает её индуктивность \(L\) (так как \(L \sim W^2\)). Схема питается от источника повышенного напряжения, а ток ограничивается мощным последовательным резистором \(R_d\).
- Физика процесса: Постоянная времени цепи уменьшается:
$$ \tau’ = \frac{L}{R_{kat} + R_d} < \tau $$
При этом установившийся ток остается номинальным: \(I_{ust} = U_{pov} / (R_{kat} + R_d)\). - Преимущества: Высокая надежность, простота реализации. Стабильность характеристик при нагреве катушки (так как \(R_d\) обычно из манганина или константана и термостабилен).
- Недостатки: Низкий КПД. На балластном резисторе постоянно рассеивается значительная мощность \(P = I^2 R_d\), что требует громоздких элементов теплоотвода.
Б. Конденсаторная форсировка (RC-схема)
Более изящное решение, использующее реактивные свойства емкости. Параллельно ограничительному резистору \(R_d\) подключается конденсатор \(C\) большой емкости.
В момент замыкания ключа (\(t=0\)) незаряженный конденсатор представляет собой короткое замыкание. Ток мгновенно течет в обмотку в обход резистора \(R_d\). К катушке прикладывается полное повышенное напряжение источника. По мере заряда конденсатора его сопротивление растет, и ток плавно переходит в цепь резистора, снижаясь до номинального уровня удержания.
Для эффективной работы параметры подбираются так, чтобы время заряда конденсатора \(3 R_d C\) примерно соответствовало времени срабатывания электромагнита.
В. Схема с «экономическим» контактом (Механическая форсировка)
Используется в контакторах локомотивов и городского электротранспорта. Катушка включается напрямую на полное напряжение сети, обеспечивая мощный рывок. В конце хода якоря механически связанный с ним вспомогательный размыкающий контакт (блок-контакт) разрывает цепь шунтирования, вводя последовательно токоограничивающий резистор.
Риск: Если механизм заклинит и контакт не разомкнется, катушка, рассчитанная на кратковременный режим перегрузки, сгорит за несколько секунд.
10.2. Методы замедления отпускания
Замедление при отключении необходимо для создания выдержек времени (реле времени) или обеспечения непрерывности питания при кратковременных провалах напряжения. Задача состоит в том, чтобы максимально долго поддерживать магнитный поток \(\Phi\) выше критического значения отпускания после размыкания цепи питания.
А. Электромагнитное демпфирование (Массивная гильза)
На сердечник магнитной системы надевается сплошная медная или алюминиевая трубка (короткозамкнутый виток с исчезающе малым сопротивлением).
- Принцип действия: При исчезновении основного тока в гильзе наводится мощный вихревой ток (до сотен ампер), который, согласно правилу Ленца, поддерживает убывающий магнитный поток.
- Регулировка: Время задержки зависит от массы меди и места установки гильзы:
- Гильза у якоря \(\rightarrow\) максимальное замедление срабатывания (сильное влияние на поток рассеяния).
- Гильза у основания (пятки) \(\rightarrow\) максимальное замедление отпускания.
- Эффективность: Позволяет получить выдержку времени от 0.5 до 5 секунд без применения механических таймеров.
Б. Схемное шунтирование (Диодная защита)
Параллельно обмотке включается полупроводниковый диод (в обратном направлении к полярности питания). Это решение является стандартом де-факто для защиты управляющей электроники, но оно также вносит задержку.
- Физика: При размыкании ключа ЭДС самоиндукции \(e_L = -L(di/dt)\) меняет полярность. Диод открывается, и ток катушки замыкается в контур «катушка-диод». Ток спадает по экспоненте:
$$ i(t) = I_0 e^{-\frac{t (R_{kat} + R_{diod})}{L}} $$
Поскольку сопротивление открытого диода \(R_{diod}\) очень мало, постоянная времени \(\tau\) получается большой, и якорь удерживается лишние 50–200 мс. - Проблема «медленного отпускания»: Иногда диод затягивает отключение настолько, что это вызывает подгорание контактов (медленный разрыв дуги).
- Решение (Ускорение спада): Последовательно с диодом включают стабилитрон (Zener diode). Он гасит энергию быстрее, создавая «противодавление», и позволяет найти баланс между защитой транзистора и скоростью отключения реле.
В. Конденсаторное замедление (RLC-контур)
Параллельно обмотке подключается конденсатор большой емкости. При отключении питания конденсатор разряжается на обмотку. В отличие от диода, здесь можно получить значительные выдержки времени (секунды). Однако, если сопротивление обмотки мало, процесс может стать колебательным, что приведет к «дребезгу» якоря (многократное включение-отключение) перед окончательным отпусканием.
11. Интересные факты об электромагнитах
Мир электромагнетизма полон удивительных рекордов и исторических парадоксов. Вот 5 фактов, которые расширят ваше понимание темы:
- Парадокс Джозефа Генри. В 1831 году американский физик Джозеф Генри создал электромагнит весом всего 27 кг, который мог удерживать груз массой 340 кг. Это стало первым наглядным доказательством того, что «электрическая мышца» может быть в десятки раз сильнее собственного веса, что предопределило развитие подъемных кранов.
- Магнитная левитация (Maglev). Самые быстрые поезда в мире (серия L0 в Японии, скорость более 600 км/ч) не имеют колес. Они парят над полотном за счет мощнейших сверхпроводящих электромагнитов. Отсутствие трения качения позволяет достигать самолетных скоростей на земле.
- Компьютер на реле. Первый в США программируемый компьютер «Марк I» (1944 год) был не электронным, а электромеханическим. Он содержал более 3000 электромагнитных реле. Характерный стук тысяч переключающихся якорей был слышен даже на улице, а «багом» (жуком) впервые назвали настоящую моль, застрявшую между контактами реле.
- Взрывная сила. Существуют специальные «ударные» электромагниты, используемые в электромагнитных штамповочных прессах. Импульс тока в них настолько мощен и кратковременен, что металл якоря разгоняется до скоростей, при которых он ведет себя как жидкость, идеально заполняя форму матрицы.
- Самый большой магнит. Самый крупный электромагнит в мире является частью детектора CMS на Большом адронном коллайдере (CERN). Соленоид весит 12 000 тонн (больше Эйфелевой башни), а запасенная в его поле энергия (2,5 Гигаджоуля) достаточна, чтобы расплавить 18 тонн золота.
12. FAQ: Часто задаваемые вопросы по эксплуатации
В цепи переменного тока (AC) ток ограничивается высоким индуктивным сопротивлением (\(X_L = \omega L\)). В цепи постоянного тока (DC) частота \(\omega = 0\), индуктивное сопротивление исчезает, и ток ограничивается только малым активным сопротивлением провода \(R\). Ток возрастет в 10–15 раз, что вызовет мгновенный перегрев и пожар.
1) Лопнул или выпал короткозамкнутый виток на полюсе (нарушилось расщепление фаз).
2) Появилась ржавчина или грязь на шлифованных поверхностях стыка якоря и ярма (воздушный зазор не закрывается полностью).
3) Перекос якоря из-за износа направляющих.
1) Уменьшить начальный зазор: Тяговая сила растет обратно пропорционально квадрату расстояния. Даже 1 мм сближения может удвоить силу.
2) Увеличить ток: (Опасно перегревом!). Возможно только в кратковременном режиме.
3) Улучшить магнитную цепь: Проверить плотность прилегания деталей магнитопровода, убрать паразитные зазоры в стыках.
Заключение
Электромагнитные механизмы остаются фундаментом современной электротехники. Несмотря на развитие полупроводников, электромагниты незаменимы там, где требуется гальваническая развязка (реле) или мощное механическое воздействие (контакторы, приводы). Изучение процессов — от вихревых токов в стали до переходных процессов в R-L цепях — позволяет создавать надежные и эффективные системы.
Мы рассмотрели путь от формулы Максвелла до борьбы с «гудением» контакторов. Главный вывод: идеального электромагнита не существует, есть правильный выбор типа (AC/DC, поляризованный) под конкретную задачу.
Нормативная база
- ГОСТ IEC 60947-1-2017 «Аппаратура распределения и управления низковольтная. Часть 1. Общие правила».
- ГОСТ 12434-83 «Аппараты коммутационные низковольтные. Общие технические условия».
- ГОСТ 19264-82 «Электромагниты управления. Общие технические условия».
- ГОСТ 17499-82 «Контакты электрические. Термины и определения».
Список рекомендуемой литературы
- Чунихин А.А. «Электрические аппараты: Общий курс».
Москва: Энергоатомиздат, 1988. — 720 с.
Классический учебник, являющийся «библией» для инженеров-электромехаников. Содержит исчерпывающий вывод формул тяговых сил и тепловых расчетов. - Гордон А.В., Сливинская А.Г. «Электромагниты постоянного тока».
Москва: Госэнергоиздат, 1960. — 447 с.
Специализированная монография, детально описывающая методики расчета магнитных цепей, катушек и динамики срабатывания.
Тепловые процессы в электрических аппаратах — это совокупность физических явлений, связанных с выделением, распространением и отводом тепловой энергии, Читать далее...

Электрический контакт — это критически важный узел любой электротехнической системы, представляющий собой квазистационарное или коммутируемое соприкосновение двух проводников, Читать далее...
Электродинамические усилия (ЭДУ) — это механические силы, возникающие между проводниками, по которым протекает электрический ток. Это фундаментальное явление Читать далее...