Содержание страницы
Частотный электрический фильтр — это устройство (представляемое в теории как четырехполюсник), предназначенное для селекции (отбора) сигналов в определенном диапазоне частот. Идеальный фильтр пропускает сигналы в заданной полосе (зоне прозрачности) без ослабления и полностью подавляет сигналы за ее пределами (в зоне затухания).
В теории цепей, фильтром называют такой четырехполюсник, у которого в определенной полосе частот коэффициент затухания \(a = 0\), а в остальной полосе \(a > 0\). Полосу частот, в которой \(a = 0\) (и, соответственно, напряжения на входе и выходе \(U_1 = U_2\)), называют зоной прозрачности. Все остальные частоты образуют зону затухания. Частоты, разделяющие эти зоны, называют частотами среза (обозначаются \(\omega_c\)).
Исторически, основы теории пассивных фильтров были заложены в начале XX века работами Джорджа Кэмпбелла (George Campbell) и Отто Зобеля (Otto Zobel) из AT&T, которые разработали фильтры типа k и m для нужд телефонной связи.
Классификация частотных фильтров
По расположению зоны прозрачности фильтры делятся на:
- Низкочастотные (ФНЧ): зона прозрачности в области \(0 < \omega < \omega_c\).
- Высокочастотные (ФВЧ): зона прозрачности в области \(\omega_c < \omega < \infty\).
- Полосовые (ПФ): зона прозрачности в области \(\omega_{c1} < \omega < \omega_{c2}\).
- Заграждающие (ЗФ) или режекторные: зоны прозрачности \(0 < \omega < \omega_{c1}\) и \(\omega_{c2} < \omega < \infty\).
По элементной базе фильтры бывают реактивные (LC), безындуктивные (RC), активные (с усилительными элементами), пьезоэлектрические, электромеханические и другие.
1. Реактивные фильтры
Определим условия, при которых симметричный четырехполюсник, состоящий из минимального количества реактивных элементов (индуктивностей L и емкостей C), будет функционировать как фильтр. Такие элементы обладают чисто мнимым (реактивным) сопротивлением и в идеале не потребляют активной мощности.
Возможны две основные симметричные схемы таких четырехполюсников: Т-образная (Рис. 1а) и П-образная (Рис. 1б). Обе они могут быть получены путем каскадного соединения двух несимметричных Г-образных звеньев (Рис. 1в). Чтобы сохранить эту взаимосвязь, параметры сопротивлений на схемах заданы соответствующим образом (Z1 разделено на Z1/2, а Z2 представлено как проводимость 1/Z2 или два параллельных сопротивления 2Z2).
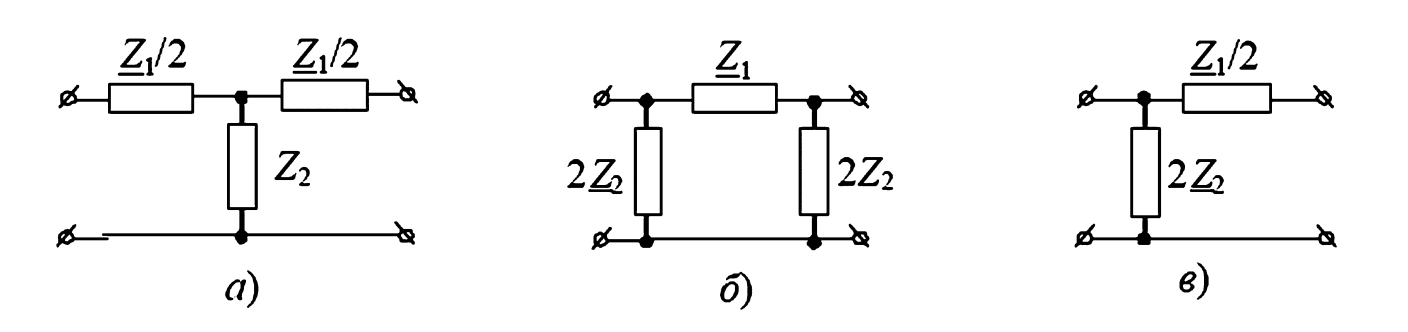
Рис. 1. Схемы реактивных фильтров: а — Т-образная; б — П-образная; в — Г-образная.
Четырехполюсник будет фильтром, если его коэффициент затухания \(a = 0\) для некоторой полосы частот. Рассмотрим Т-образную схему (Рис. 1а). Для нее коэффициент передачи \(g\) (называемый также постоянной передачи) в режиме холостого хода или короткого замыкания связан с параметрами схемы через гиперболический косинус:
$$
\cosh(g) = A = \frac{U_{1xx}}{U_{2xx}} = 1 + \frac{Z_1}{2Z_2}
$$
Где \(g = a + jb\), \(a\) — коэффициент затухания, \(b\) — коэффициент фазы.
Распишем левую часть по формуле Эйлера для гиперболических функций:
$$
\cosh(a + jb) = \cosh(a)\cos(b) + j \sinh(a)\sin(b)
$$
Приравнивая это к правой части, получаем комплексное уравнение:
$$
\cosh(a)\cos(b) + j \sinh(a)\sin(b) = 1 + \frac{Z_1}{2Z_2} \quad (1)
$$
Поскольку мы рассматриваем реактивный фильтр, сопротивления \(Z_1\) и \(Z_2\) являются чисто мнимыми (например, \(Z_1 = jX_1\) и \(Z_2 = jX_2\)). Это значит, что их отношение \(Z_1 / Z_2\) всегда является вещественным числом. Следовательно, вся правая часть уравнения (1) является вещественным числом. Это позволяет нам приравнять мнимую часть левой части к нулю, а вещественную — к правой части. Уравнение (1) распадается на два:
$$
\cosh(a)\cos(b) = 1 + \frac{Z_1}{2Z_2} \quad (1а)
$$
$$
\sinh(a)\sin(b) = 0 \quad (1б)
$$
Анализ зоны прозрачности
В зоне прозрачности по определению \(a = 0\). При этом \(\sinh(a) = \sinh(0) = 0\) и \(\cosh(a) = \cosh(0) = 1\).
Уравнение (1б) выполняется автоматически (\(0 \cdot \sin(b) = 0\)).
Уравнение (1а) принимает вид:
$$
\cos(b) = 1 + \frac{Z_1}{2Z_2}
$$
Известно, что функция \(\cos(b)\) может принимать значения только в диапазоне от –1 до 1. Следовательно, зона прозрачности существует только для тех частот, где выполняется условие:
$$
-1 \le 1 + \frac{Z_1}{2Z_2} \le 1
$$
Вычитая 1 из всех частей, получаем фундаментальное условие для зоны прозрачности:
$$
-2 \le \frac{Z_1}{2Z_2} \le 0
$$
Это условие может выполняться, только если сопротивления \(Z_1\) и \(Z_2\) имеют разный характер (разные знаки реактивности), то есть одно является индуктивным (\(j\omega L\)), а другое — емкостным (\(-j / (\omega C)\)). В этом случае их отношение \(Z_1 / Z_2 = (j\omega L) / (-j / (\omega C)) = -\omega^2 LC\) будет вещественным и отрицательным, что и требуется.
Границами зоны прозрачности будут частоты, где \(\frac{Z_1}{2Z_2} = 0\) или \(\frac{Z_1}{2Z_2} = -2\) (т.е. \(Z_1 = -4Z_2\)).
В этой зоне коэффициент фазы \(b\) определяется из:
$$
\cos(b) = 1 + \frac{Z_1}{2Z_2} \quad \text{или} \quad \sin^2\left(\frac{b}{2}\right) = \frac{1 — \cos(b)}{2} = — \frac{Z_1}{4Z_2}
$$
$$
\sin\left(\frac{b}{2}\right) = \sqrt{-\frac{Z_1}{4Z_2}} \quad (2)
$$
Анализ зоны затухания
В зоне затухания \(a \neq 0\), следовательно, \(\sinh(a) \neq 0\).
Чтобы уравнение (1б) \(\sinh(a)\sin(b) = 0\) выполнялось, необходимо, чтобы \(\sin(b) = 0\). Это возможно при \(b = 0\) или \(b = \pm\pi\).
- Если \(b = 0\), то \(\cos(b) = 1\). Уравнение (1а) дает \(\cosh(a) = 1 + \frac{Z_1}{2Z_2}\). В зоне затухания \(\frac{Z_1}{2Z_2}\) выходит за пределы \([-2, 0]\). Если \(Z_1\) и \(Z_2\) разного знака, то \(\frac{Z_1}{2Z_2}\) отрицательно, и при \(\frac{Z_1}{2Z_2} < -2\) (например, -3), \(\cosh(a)\) было бы отрицательным, что невозможно. Если \(\frac{Z_1}{2Z_2} > 0\) (одинаковый тип реактивностей), то \(\cosh(a) > 1\), что соответствует затуханию, но не создает зоны прозрачности. Поэтому для фильтров, у которых \(Z_1\) и \(Z_2\) разного типа, решение \(b=0\) не используется.
- Остается только одно решение: в зоне затухания \(b = \pm\pi\). При этом \(\cos(b) = -1\).
Подставив \(b = \pm\pi\) в уравнение (1а), получаем:
$$
\cosh(a) \cdot (-1) = 1 + \frac{Z_1}{2Z_2}
$$
$$
\cosh(a) = -1 — \frac{Z_1}{2Z_2} = -\left(1 + \frac{Z_1}{2Z_2}\right) \quad (3)
$$
Это выражение корректно, так как в этой зоне \(\left(1 + \frac{Z_1}{2Z_2}\right)\) меньше чем -1, и \(\cosh(a)\) будет больше 1.
Ключевые выводы по реактивным фильтрам:
- Фильтр должен состоять из реактивных элементов разного типа (L и C).
- Зона прозрачности (\(a=0\)): \(-2 \le \frac{Z_1}{2Z_2} \le 0\). Фаза \(b\) изменяется.
- Зона затухания (\(a > 0\)): \(\frac{Z_1}{2Z_2} < -2\). Фаза \(b\) постоянна и равна \(\pm\pi\).
Характеристическое сопротивление
Характеристическое (волновое) сопротивление \(Z_c\) является важным параметром для согласования фильтра с нагрузкой. Для Т-образной схемы оно равно:
$$
Z_{CT} = \sqrt{Z_1 Z_2 + \frac{Z_1^2}{4}} = \sqrt{Z_1 Z_2 \left(1 + \frac{Z_1}{4Z_2}\right)}
$$
Для П-образной схемы:
$$
Z_{C\Pi} = \frac{Z_1 Z_2}{Z_{CT}} = \frac{Z_1 Z_2}{\sqrt{Z_1 Z_2 + \frac{Z_1^2}{4}}} = \frac{\sqrt{Z_1 Z_2}}{\sqrt{1 + \frac{Z_1}{4Z_2}}}
$$
Введем параметр номинального характеристического сопротивления \(k = \sqrt{Z_1 Z_2}\). Поскольку \(Z_1\) и \(Z_2\) — реактивности разного знака, их произведение \(Z_1 Z_2 = (j\omega L)(-j/(\omega C)) = L/C\) является вещественным, положительным и постоянным (не зависит от частоты!). Такие фильтры называют фильтрами типа k (постоянного k).
Выражение \(1 + \frac{Z_1}{4Z_2}\) в зоне прозрачности (где \(-2 \le \frac{Z_1}{2Z_2} \le 0\)) изменяется от 0 до 1. Это означает, что в зоне прозрачности \(Z_c\) является чисто активным (вещественным) сопротивлением. В зоне затухания \(Z_c\) становится чисто реактивным.
Характеристическое сопротивление \(Z_c\) в зоне прозрачности изменяется при изменении частоты:
- У Т-образного фильтра: от 0 до \(k\).
- У П-образного фильтра: от \(k\) до \(\infty\).
1.1. Низкочастотный фильтр (ФНЧ) типа k
Для создания фильтра низких частот (ФНЧ) необходимо, чтобы \(a = 0\) было в полосе \(0 < \omega < \omega_c\). Условие \(Z_1/(2Z_2) = 0\) должно выполняться при \(\omega = 0\). Это достигается, если \(Z_1\) — индуктивность, а \(Z_2\) — емкость.
- Продольное сопротивление: \(Z_1 = j\omega L\) (равно 0 при \(\omega = 0\))
- Поперечное сопротивление: \(Z_2 = 1 / (j\omega C) = -j / (\omega C)\) (бесконечно при \(\omega = 0\))
На другой границе зоны (частоте среза \(\omega_c\)) выполняется условие \(Z_1 = -4Z_2\):
$$
j\omega_c L = -4 \left( \frac{1}{j\omega_c C} \right) = \frac{4j}{\omega_c C}
$$
$$
\omega_c^2 LC = 4 \quad \Rightarrow \quad \omega_c = \frac{2}{\sqrt{LC}}
$$
На Рисунке 2 представлены Т- и П-образные схемы ФНЧ.
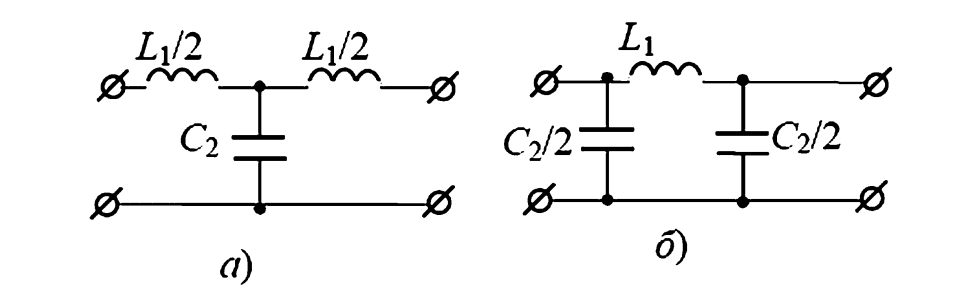
Рис. 2. Схемы низкочастотных фильтров типа k: а — Т-образная; б — П-образная.
На Рисунке 3 показаны частотные зависимости параметров ФНЧ. Коэффициент затухания \(a\) равен нулю до \(\omega_c\) и резко растет после. Коэффициент фазы \(b\) линейно растет до \(\pi\), а затем остается постоянным. Характеристическое сопротивление \(Z_c\) (Рис. 3в) сильно изменяется в зоне прозрачности. Из-за этого согласовать нагрузку с фильтром можно только на одной частоте. Обычно сопротивление нагрузки \(R_н\) принимают равным номинальному \(k = \sqrt{L/C}\).
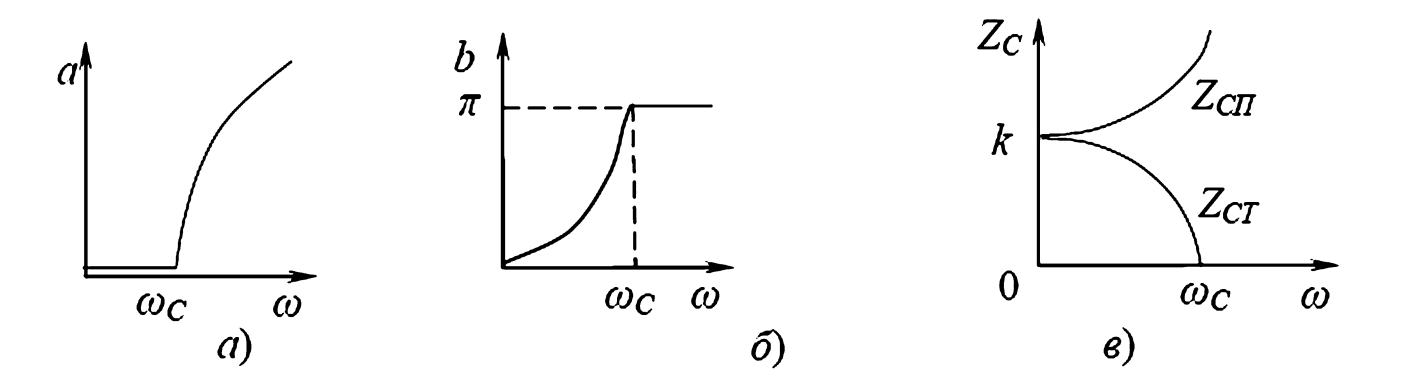
Рис. 3. Зависимости от частоты для ФНЧ типа k: а — коэффициента затухания; б — коэффициента фазы; в — характеристического сопротивления.
1.2. Высокочастотный фильтр (ФВЧ) типа k
Для фильтра высоких частот (ФВЧ) необходимо, чтобы \(a = 0\) при \(\omega_c < \omega < \infty\). Условие \(Z_1/(2Z_2) = 0\) должно выполняться при \(\omega = \infty\). Это достигается, если \(Z_1\) — емкость, а \(Z_2\) — индуктивность.
- Продольное сопротивление: \(Z_1 = 1 / (j\omega C) = -j / (\omega C)\)
- Поперечное сопротивление: \(Z_2 = j\omega L\)
На частоте среза \(\omega_c\) также выполняется \(Z_1 = -4Z_2\):
$$
\frac{1}{j\omega_c C} = -4 (j\omega_c L) = \frac{4 \omega_c L}{j}
$$
$$
1 = 4 \omega_c^2 LC \quad \Rightarrow \quad \omega_c = \frac{1}{2\sqrt{LC}}
$$
На Рисунке 4 представлены схемы и графики параметров ФВЧ.
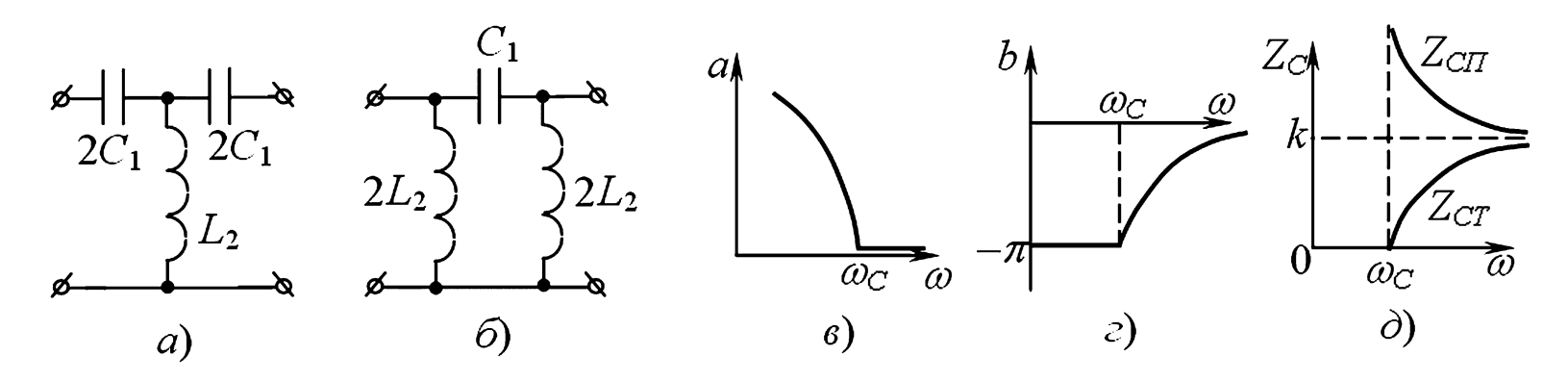
Рис. 4. Схемы высокочастотных фильтров типа k: а — Т-образная; б — П-образная; и зависимости от частоты: в — коэффициента затухания; г — коэффициента фазы; д — характеристического сопротивления.
1.3. Фильтры типа m
Фильтры типа k имеют два существенных недостатка:
- Коэффициент затухания \(a\) медленно нарастает вблизи частоты среза \(\omega_c\).
- Характеристическое сопротивление \(Z_c\) сильно изменяется в зоне прозрачности, что мешает хорошему согласованию с нагрузкой.
Для устранения этих недостатков используют фильтры типа m (производные). Их получают из фильтров типа k, добавляя реактивное сопротивление противоположного знака в продольную или поперечную ветвь (Рис. 5а). Это создает LC-резонанс (параллельный или последовательный) в зоне затухания, на частоте \(\omega_\infty\).
На этой частоте резонанса сопротивление одной из ветвей становится бесконечным (в Т-схеме) или нулевым (в П-схеме), что приводит к бесконечному затуханию (\(a \to \infty\)).
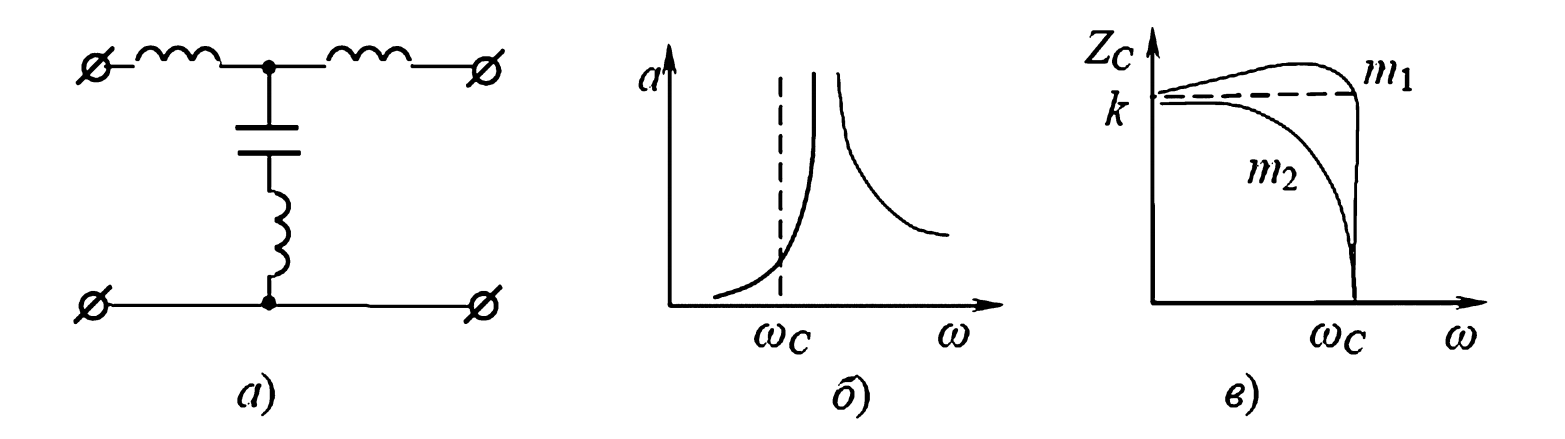
Рис. 5. Низкочастотный фильтр типа m: а — схема; зависимости от частоты: б — коэффициента затухания; в — характеристического сопротивления.
Как видно из графика (Рис. 5б), затухание очень резко возрастает сразу за частотой среза, достигая пика. Однако, при дальнейшем удалении от \(\omega_c\), затухание начинает уменьшаться.
Параметр \(m\) ( \(0 < m < 1\) ) определяет, как близко к \(\omega_c\) находится этот пик затухания. При \(m \to 0\) пик уходит на бесконечность (превращаясь в k-фильтр).
Важнейшим преимуществом m-фильтров является их характеристическое сопротивление (Рис. 5в). При \(m \approx 0.6\), \(Z_c\) остается почти постоянным в 80-90% зоны прозрачности, что обеспечивает отличное согласование. На практике часто создают комбинированные фильтры: внутренние звенья делают типа k (для обеспечения затухания), а крайние звенья — типа m (для согласования с нагрузкой).
2. Активные фильтры
Пассивные LC-фильтры, особенно на низких частотах (аудио, телеметрия), требуют использования катушек индуктивности. Индуктивности — это громоздкие, дорогие, неидеальные (имеют активное сопротивление) компоненты, подверженные влиянию магнитных полей. Активные RC-фильтры решают эту проблему, полностью исключая индуктивности.
Они строятся на базе активных усилительных элементов (обычно операционных усилителей — ОУ) и пассивных RC-цепей. Существует множество схем таких фильтров.
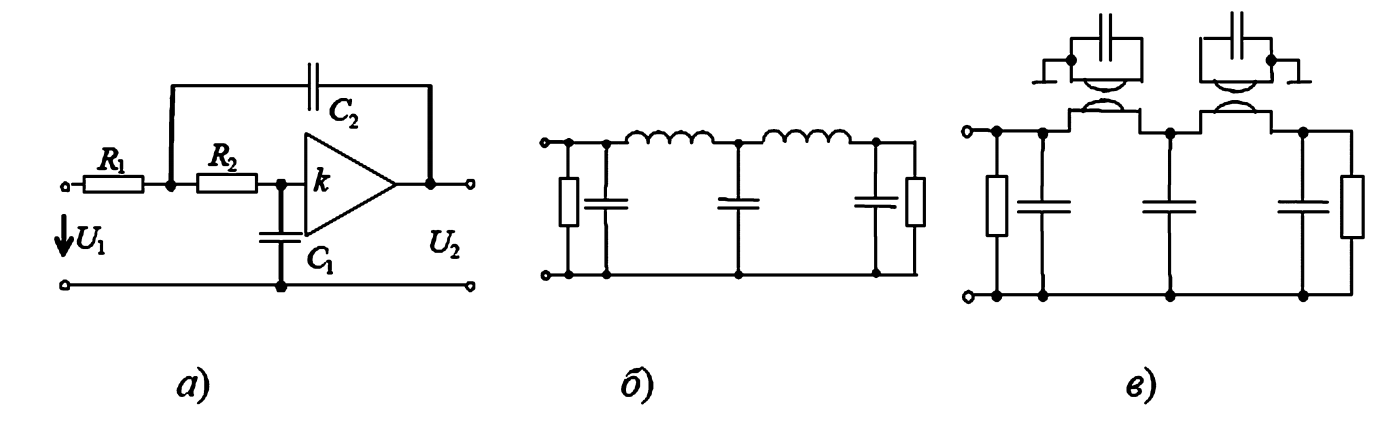
Рис. 6. Схемы фильтров: а — активный RC-фильтр; б — пассивный LC-фильтр (прототип); в — фильтр с имитацией индуктивности (на гираторах).
На Рисунке 6а приведена схема простейшего активного ФНЧ (например, фильтр Саллена-Ки). Его характеристики (крутизна спада, стабильность) сильно зависят от параметров ОУ и номиналов RC-цепей.
Более стабильный подход — имитация индуктивности. Пассивные LC-фильтры (Рис. 6б) обладают низкой чувствительностью к изменению номиналов элементов. С помощью специальных схем на ОУ, называемых гираторами, можно «превратить» конденсатор в эквивалентную индуктивность. Гиратор — это четырехполюсник, который «переворачивает» импеданс. Если к выходу гиратора подключить конденсатор \(C\), то со входа схема будет выглядеть как индуктивность \(L_{экв}\).
Это позволяет взять проверенную схему пассивного LC-прототипа (Рис. 6б) и заменить в ней все «плавающие» (незаземленные) индуктивности на связку «гиратор + конденсатор» (Рис. 6в). Такой подход позволяет получить активный фильтр с высокой стабильностью и предсказуемыми характеристиками пассивного прототипа, но без его недостатков (размеров и неидеальности катушек).
3. Сравнительная характеристика типов фильтров
Сведем ключевые особенности рассмотренных типов фильтров в единую таблицу для удобства сравнения.
| Параметр | Фильтры типа k (пассивные) | Фильтры типа m (пассивные) | Активные RC-фильтры |
|---|---|---|---|
| Элементная база | Индуктивности (L) и конденсаторы (C) | Индуктивности (L) и конденсаторы (C) | Резисторы (R), конденсаторы (C) и активные элементы (ОУ) |
| Крутизна спада АЧХ | Низкая, плавная вблизи \(\omega_c\) | Высокая, с пиком затухания на \(\omega_\infty\) | Высокая, определяется порядком фильтра (количеством каскадов) |
| Стабильность \(Z_c\) | Низкая (сильно меняется в зоне прозрачности) | Высокая (при \(m \approx 0.6\), \(Z_c\) почти постоянно) | Высокое входное и низкое выходное R, легко согласуется |
| Размеры (на НЧ) | Большие (из-за L) | Большие (из-за L) | Компактные (нет индуктивностей) |
| Потребление энергии | Нет (пассивные) | Нет (пассивные) | Да (требует источник питания для ОУ) |
| Усиление сигнала | Невозможно (только затухание) | Невозможно (только затухание) | Возможно (может одновременно фильтровать и усиливать) |
| Основное применение | Простые ВЧ-приложения, звенья комбинированных фильтров | Входные/выходные звенья для согласования, ВЧ-приложения | Низкочастотная обработка сигналов (аудио, управление, медицина) |
4. Интересные факты о фильтрах
- Происхождение «k»: Название «фильтр типа k» происходит от «constant-k» (постоянная k). Это связано с тем, что в их конструкции произведение продольного (\(Z_1\)) и поперечного (\(Z_2\)) импедансов является константой (\(Z_1 \cdot Z_2 = k^2\)), не зависящей от частоты (\(k^2 = L/C\)).
- Эволюция от k к m: Фильтры типа m (m-derived) были разработаны Отто Зобелем в 1920-х годах как прямое улучшение фильтров типа k, созданных Джорджем Кэмпбеллом. Основной задачей было решение проблемы плохого согласования импеданса.
- «Магия» гиратора: Активная схема «гиратор», используемая для имитации индуктивности, получила свое название по аналогии с «трансформатором». Она выполняет «гирацию» — преобразование, которое «переворачивает» импеданс. Подключенный к гиратору конденсатор (\(Z = 1/(j\omega C)\)) со входа выглядит как индуктивность (\(Z \sim j\omega L\)).
- Низкочастотная проблема: Главным стимулом к развитию активных RC-фильтров в 1960-70-х годах стала «низкочастотная проблема». Для фильтрации, например, звуковых частот (\(< 20 \text{ кГц}\)) требуются катушки индуктивности с огромными номиналами (десятки Генри), которые практически невозможно изготовить в компактном, качественном и дешевом виде.
- Цифровое настоящее: Сегодня подавляющее большинство сложных задач фильтрации в телекоммуникациях, аудио и видео решается методами цифровой обработки сигналов (DSP). Аналоговый сигнал оцифровывается (АЦП), «фильтруется» с помощью математических алгоритмов в процессоре, а затем преобразуется обратно (ЦАП). Однако пассивные и активные фильтры по-прежнему незаменимы для защиты от помех, сглаживания (anti-aliasing) перед АЦП и в силовой электронике.
5. Часто задаваемые вопросы (FAQ)
1. Что такое частота среза?
Ответ: Это граничная частота (\(\omega_c\)), которая отделяет зону прозрачности (где сигнал проходит) от зоны затухания (где сигнал подавляется). В теории идеальных реактивных фильтров на этой частоте происходит резкий переход от \(a=0\) к \(a>0\).
2. Почему в реактивных фильтрах Z1 и Z2 должны быть разного типа (L и C)?
Ответ: Потому что условие для существования зоны прозрачности — \(-2 \le Z_1 / (2Z_2) \le 0\). Отношение \(Z_1/Z_2\) должно быть отрицательным вещественным числом. Если \(Z_1 = j\omega L\) (положительное мнимое), а \(Z_2 = 1/(j\omega C) = -j/(\omega C)\) (отрицательное мнимое), их отношение \((j\omega L) / (-j/(\omega C)) = -\omega^2 LC\), что является отрицательным и вещественным. Если бы они были одного типа (например, два индуктора), их отношение было бы положительным.
3. Какое главное преимущество m-фильтра над k-фильтром?
Ответ: У m-фильтра два главных преимущества: 1) Он имеет гораздо более резкий спад затухания сразу за частотой среза, так как у него есть «пик» бесконечного затухания. 2) При правильном выборе параметра \(m \approx 0.6\) его характеристическое сопротивление \(Z_c\) почти постоянно в зоне прозрачности, что позволяет идеально согласовать его с нагрузкой.
4. Почему в активных фильтрах не используют катушки индуктивности?
Ответ: Вся суть активных фильтров — избавиться от катушек индуктивности, особенно на низких частотах. Индуктивности громоздки, дороги, имеют большое внутреннее сопротивление (неидеальны), чувствительны к электромагнитным помехам и их сложно интегрировать в микросхемы. Активные фильтры заменяют их компактными, дешевыми и стабильными RC-цепями и операционными усилителями.
5. Что такое «зона прозрачности»?
Ответ: Это диапазон частот, в котором идеальный фильтр пропускает сигнал без ослабления (без затухания). В теории цепей это означает, что в этом диапазоне коэффициент затухания четырехполюсника \(a = 0\).
Заключение
Частотные фильтры являются фундаментальными блоками в электротехнике, радиотехнике и обработке сигналов. Рассмотренная теория пассивных реактивных фильтров (типа k и m) заложила основу для проектирования цепей частотной селекции.
Фильтры типа k представляют собой базовую реализацию, в то время как фильтры типа m являются их усовершенствованием, предлагая более резкое затухание и превосходное согласование импеданса. С развитием микроэлектроники широчайшее распространение получили активные RC-фильтры, которые исключили необходимость в громоздких индуктивностях, особенно в низкочастотных приложениях, и добавили возможность усиления сигнала. Выбор между пассивными LC-фильтрами (которые до сихP пор доминируют в ВЧ-силовой электронике и радиопередатчиках) и активными RC-фильтрами (доминирующими в обработке сигналов) диктуется конкретной задачей, диапазоном частот и требованиями к мощности.
Нормативные документы
- ГОСТ Р 70024.2-2022 — «Государственная система обеспечения единства измерений. Фильтры полосовые октавные и на долю октавы. Часть 2. Испытания в целях утверждения типа».
Рекомендуемая литература
- Бессонов Л. А. Теоретические основы электротехники. Электрические цепи. — М.: Гардарики, 2007. — 701 с.
- Зевеке Г. В., Ионкин П. А., Нетушил А. В., Страхов С. В. Основы теории цепей. — М.: Энергоатомиздат, 1989. — 528 с.
- Zobel, O. J. Theory and Design of Electric Wave Filters // Bell System Technical Journal, Vol. 2. — 1923. — pp. 1-46.
- Campbell, G. A. Physical Theory of the Electric Wave-Filter // Bell System Technical Journal, Vol. 1, No. 2. — 1922. — pp. 1-32.

Метод эквивалентного генератора (МЭГ) является одним из фундаментальных методов расчета сложных линейных электрических цепей. В отечественной и Читать далее...
Концепция эквивалентного генератора — это основной инструмент в теории электрических цепей (ТОЭ). Что это? По сути, это метод, Читать далее...
Асинхронный электродвигатель (АД) — это электрическая машина переменного тока, в которой частота вращения ротора не равна (асинхронна) частоте Читать далее...
Емкостный элемент (или конденсатор) в цепи переменного тока — это один из фундаментальных компонентов электротехники, обладающий свойством накапливать Читать далее...