
Схемы управления электроприводами
Управление приводами включает в себя пуск электродвигателя в работу, регулирование скорости вращения, изменение направления вращения, торможение и останов электродвигателя. Для управления приводами применяются электрические коммутационные аппараты, такие как автоматические и неавтоматические выключатели, контакторы и магнитные пускатели. Для защиты электродвигателей от ненормальных режимов (перегрузок и коротких замыканий) применяются автоматические выключатели, предохранители и тепловые реле.
 Управление электродвигателями с короткозамкнутым ротором. На рис. 2.8 приведена схема управления асинхронным двигателем с короткозамкнутым ротором с помощью магнитного пускателя.
Управление электродвигателями с короткозамкнутым ротором. На рис. 2.8 приведена схема управления асинхронным двигателем с короткозамкнутым ротором с помощью магнитного пускателя.
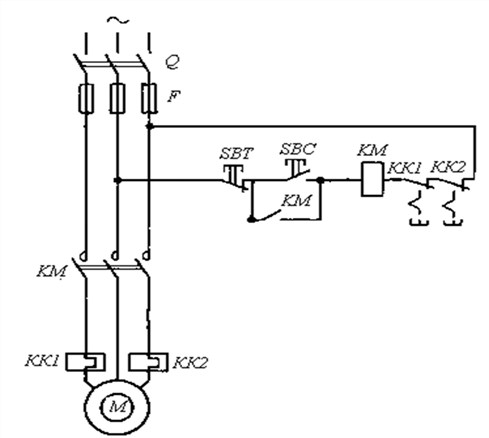
Рис. 2.8. Схема управления асинхронным электродвигателем с короткозамкнутым ротором с помощью магнитного пускателя: Q – выключатель; F – предохранитель;
КМ – магнитный пускатель, КК1, КК2 – тепловое реле; SBC – кнопочный выключатель включения двигателя; SBT – кнопочный выключатель отключения двигателя
Магнитные пускатели широко применяются для двигателей мощностью до 100 кВт. Они применяются в продолжительном иповторнократковременном режиме работы привода. Магнитный пускатель позволяет осуществлять дистанционный пуск. Для включения электродвигателя М первым включается выключатель Q. Пуск двигателя в работу осуществляется включением кнопочного выключателя SBС. Катушка (электромагнит включения) магнитного пускателя КМ получает питание от сети и замыкает контакты КМ в главной цепи и в цепи управления. Вспомогательный контакт КМ в цепи управления шунтирует кнопочный выключатель SBС и обеспечивает продолжительную работу привода после снятия нагрузки нажатия с кнопочного выключателя. Для защиты электродвигателя от перегрузки в магнитном пускателе имеются тепловые реле КК1 и КК2, включаемые в две фазы электродвигателя. Вспомогательные контакты этих реле включаются в цепь питания катушки КМ магнитного пускателя. Для защиты от коротких замыканий в каждой фазе главной цепи электродвигателя устанавливаются предохранители F. Предохранители могут устанавливаться и в цепи управления. В реальных схемах неавтоматический выключатель Q и предохранители Fмогут быть заменены автоматическим выключателем. Отключение электродвигателя осуществляется нажатием на кнопочный выключатель SBТ.
Простейшая схема управления электродвигателем может иметь только неавтоматический выключательQи предохранителиF или автоматический выключатель.
Во многих случаях при управлении электроприводом необходимо изменять направление вращения электродвигателя. Для этого применяются реверсивные магнитные пускатели.
На рис. 2.9 приведена схема управления асинхронным электродвигателем с короткозамкнутым ротором с помощью реверсивного магнитного пускателя. Для включения электродвигателя М должен быть включен выключатель Q. Включение электродвигателя для одного направления, условно «Вперед», производится нажатием кнопочного выключателя SBС1в цепи питания катушки КМ1 магнитного пускателя.При этом катушка (электромагнит включения) магнитного пускателя КМ1 получает питание от сети и замыкает контакты КМ1 в
главной цепи и в цепи управления. Вспомогательный контакт КМ1 в цепи управления шунтирует кнопочный выключатель SBС1 и обеспечивает продолжительную работу привода после снятия нагрузки нажатия с кнопочного выключателя.
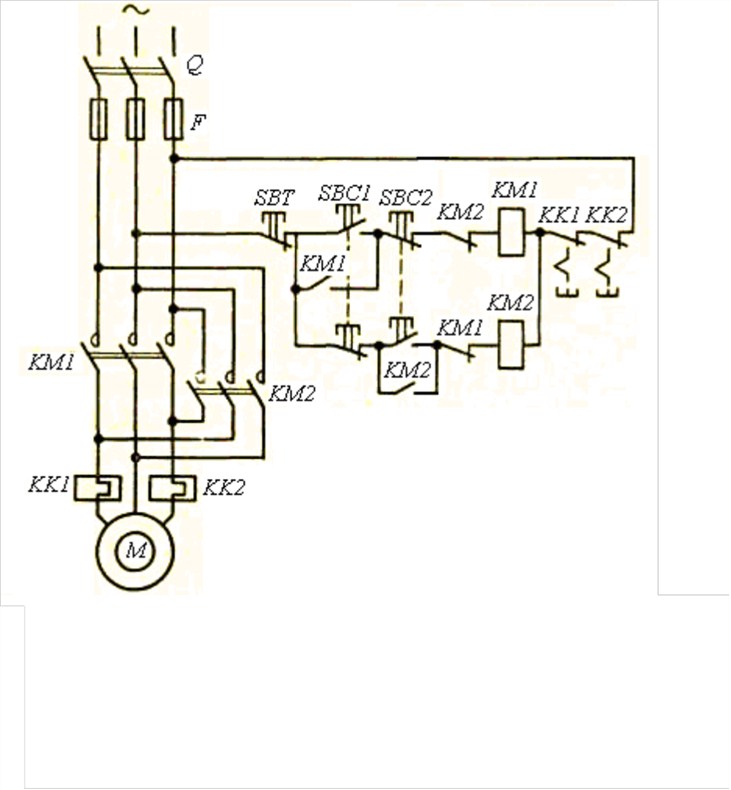
Рис. 2.9. Схема управления асинхронным электродвигателем с короткозамкнутым ротором с помощью реверсивного магнитного пускателя: Q – выключатель; F – предохранитель; КМ1, КМ2 – магнитный пускатель, КК1, КК2 – тепловое реле; SBC1, SBC2 – кнопочный выключатель включения двигателя; SBT – кнопочный выключатель отключения двигателя
Для пуска электродвигателя в противоположном направлении, условно
«Назад», необходимо нажать кнопочный выключатель SBС2. Кнопочные выключатели SBС1и SBС2 имеют электрическую блокировку, исключающую возможность одновременного включения катушек КМ1 и КМ2. Для этого в цепь катушки КМ1 включается вспомогательный контакт пускателя КМ2, а в цепь катушки КМ2 – вспомогательный контакт КМ1.
Для отключения электродвигателя от сети при его вращении в любом направлении необходимо нажать на кнопочный выключатель SBТ. При этом цепь любой катушки и КМ1 и КМ2 разрывается, их контакты в главной цепи электродвигателя размыкаются, и электродвигатель останавливается.
Схема реверсивного включения может в обоснованных случаях применяться для торможения двигателя противовключением.
Управление электродвигателями с фазным ротором. На рис. 2.10 приведена схема управления асинхронным двигателем с фазным ротором.
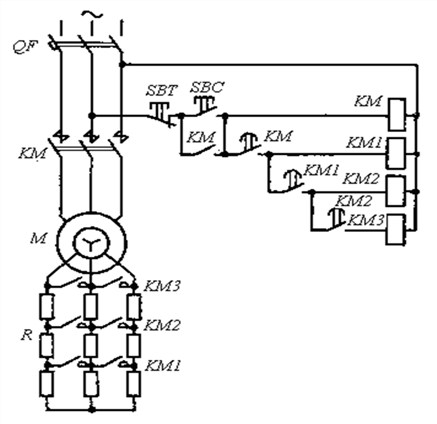 Рис. 2.10. Схема управления асинхронным двигателем
Рис. 2.10. Схема управления асинхронным двигателем
с фазным ротором: QF – выключатель; КМ – магнитный пускатель в цепи статора, КМ1 – КМ3 – магнитный пускатель ускорения; SBC – кнопочный выключатель включения двигателя;R – пусковой реостат; SBT – кнопочный выключатель отключения двигателя
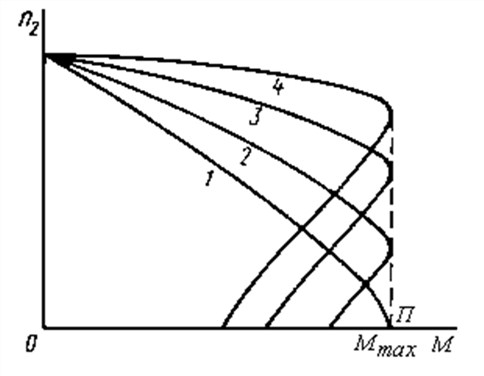 В приведенной схеме защита двигателя М от коротких замыканий и перегрузок осуществляется автоматическим выключателем QF. Для уменьшения пускового тока и увеличения пускового момента в цепь ротора включен трехступенчатый пусковой реостат R. Количество ступеней может быть различным. Пуск электродвигателя осуществляется линейным контактором КМ и контакторами ускорения КМ1 – КМ3. Контакторы снабжены реле времени. После включения автоматического выключателя QF кнопочным выключателем SBC включается линейный контактор КМ, который мгновенно замыкает свои контакты в главной цепи и шунтирует контакты кнопочного выключателя SBC. Двигатель начинает вращаться при полностью введенном пусковом реостате R (механическая характеристика 1 на рис. 2.11). Точка П является точкой трогания.
В приведенной схеме защита двигателя М от коротких замыканий и перегрузок осуществляется автоматическим выключателем QF. Для уменьшения пускового тока и увеличения пускового момента в цепь ротора включен трехступенчатый пусковой реостат R. Количество ступеней может быть различным. Пуск электродвигателя осуществляется линейным контактором КМ и контакторами ускорения КМ1 – КМ3. Контакторы снабжены реле времени. После включения автоматического выключателя QF кнопочным выключателем SBC включается линейный контактор КМ, который мгновенно замыкает свои контакты в главной цепи и шунтирует контакты кнопочного выключателя SBC. Двигатель начинает вращаться при полностью введенном пусковом реостате R (механическая характеристика 1 на рис. 2.11). Точка П является точкой трогания.
Рис. 2.11. Механические характеристики асинхронного двигателя с фазным ротором: 1, 2, 3 –
при включении ступеней пускового реостата; 4 – естественная;
П – точка пуска;
Контакт реле времени КМ в цепи катушки контактора КМ1 с выдержкой времени t1 (рис. 2.12) включает контактор КМ1, который замыкает контакты первой ступени в цепи пускового реостата. С выдержкой времени t2включается контактор КМ2. Аналогично проходит процесс переключения ступеней пускового реостата R до перехода электропривода на естественную характеристику (кривая 4).
Изменение тока статора Iи частоты вращения ротора n2во время пуска электродвигателя показано на рис. 2.12.
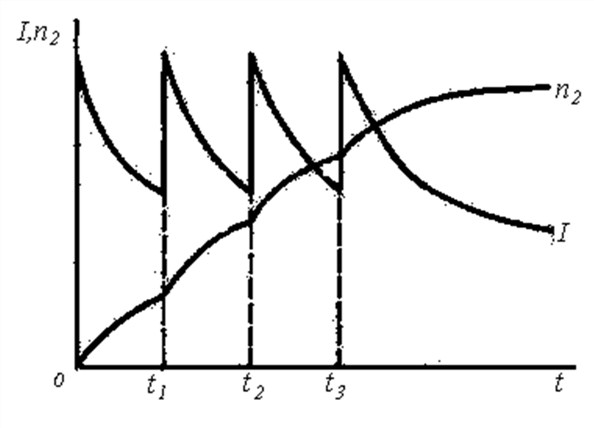 Рис. 2.12. Изменение тока статора и частоты вращения ротора асинхронного двигателя с фазным ротором во время пуска
Рис. 2.12. Изменение тока статора и частоты вращения ротора асинхронного двигателя с фазным ротором во время пуска
На естественной характеристике ток статора и частота вращения ротора достигают номинальных значений.
Остановка электродвигателя осуществляется кнопочным выключателем SBT.
Электрическая блокировка в приводах. В многодвигательных приводах или приводах механизмов, связанных общей технологической зависимостью, должна быть обеспечена определенная очередность включения и отключения электродвигателей. Это достигается применением механической или электрической блокировки. Электрическая блокировка осуществляется путем применения дополнительных вспомогательных контактов коммутационных аппаратов, участвующих в управлении приводами. На рис. 2.13 приведена схема блокировки последовательности пуска и остановки двух электродвигателей.
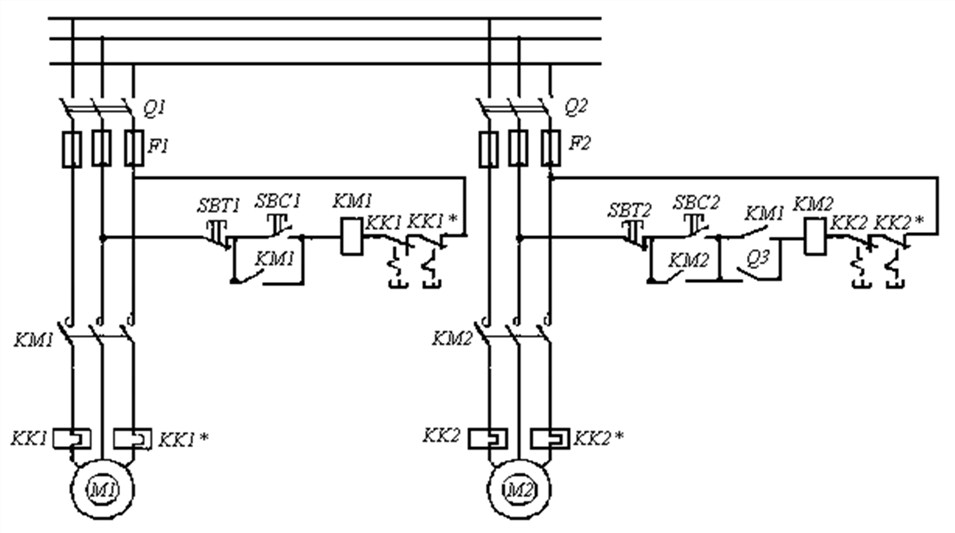
Рис. 2.13. Схема блокировки последовательности управления двух электродвигателей: Q1, Q2 – выключатель; F1, F2 – предохранитель; КМ1, КМ2 – магнитный пускатель, КК1, КК2 – тепловое реле; SBC1, SBC2 – кнопочный выключатель включения двигателя;SBT1, SBT2 – кнопочный выключатель отключения двигателя; Q3 – вспомогательный выключатель
В схеме исключена возможность пуска электродвигателя М2 раньше пуска двигателя М1. Для этого в цепь управления магнитного пускателя КМ2, осуществляющего пуск и остановку электродвигателя М2, включен замыкающий вспомогательный контакт КМ1, связанный с пускателем КМ1. В случае остановки электродвигателя М1 этот же контакт произведет автоматическое отключение двигателя М2. При необходимости самостоятельного пуска электродвигателя при опробовании механизма в цепи управления имеется выключатель Q3, который необходимо предварительно замкнуть. Включение электродвигателя М2 осуществляется кнопочным выключателем SBC2, а отключение – SBТ2. Включение двигателя М1 осуществляется выключателем SBC1, а отключение – SBT1. При этом отключается и выключатель М2.
Регулирование скорости рабочего органа машины или механизма. Скорость рабочего органа машины можно изменить за счет применения редукторов или путем изменения частоты вращения электродвигателя. Частоту вращения электродвигателя можно изменить несколькими способами. В строительных машинах и механизмах применяют редукторы с зубчатой, ременной и цепной передачами, позволяющими изменять передаточное число. В приводах, где применяются двигатели с короткозамкнутым ротором, частоту вращения электродвигателя изменяют путем изменения числа пар полюсов. Для этих целей применяют либо электродвигатель с двумя обмотками статора, каждая из которых имеет разное количество пар полюсов, либо электродвигатель с переключением секций фазных обмоток статора.
Возможно регулирование частоты вращения изменением напряжения на обмотке статора. Для этих целей используются автотрансформаторы с плавным регулированием напряжения, магнитные усилители, тиристорные регуляторы напряжения.
| Сервопривод. Сервоприводы с современными синхронными электродвигателями |
| Коротко о частотно-регулируемом приводе. Преобразователь частоты. |
| Альтернативное решение по замене башен Рожновского |