
Теория электротехники
30.05.11 |
Инвертор. Устройство и принцип действия инвертора.
В инверторе применяются управляемые полупроводниковые вентили (транзисторы или тиристоры), которые могут произвольно открываться или закрываться (рис. 1). В случае простейшей мостовой схемы получается четырехугольная форма полупериодов выходного тока, но при помощи фильтров, включенных последовательно с инвертором, можно добиться, как это обычно и требуется, синусоидальной формы тока. Если для управления вентилями использовать быстродействующее числовое программное управление, то вместо четырехугольной формы инвертированного тока можно получить пакет импульсов различной ширины, который при помощи фильтров легко преобразовать в синусоидальный ток. Упрощенно такой принцип широтно-импульсной модуляции представлен на рис. 1,c.
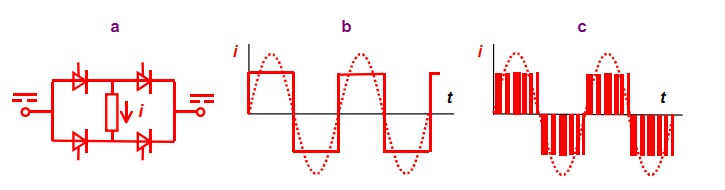
Рис. 1. Схема (a) и форма выходного тока мостового инвертора (b четырехугольная, c получаемая при широтно-импульсной модуляции). i мгновенное значение тока, t время
Условное обозначение инвертора представлено на рис. 2.
Рис. 2. Условное обозначение инвертора
Рис. 1. Схема (a) и форма выходного тока мостового инвертора (b четырехугольная, c получаемая при широтно-импульсной модуляции). i мгновенное значение тока, t время
Условное обозначение инвертора представлено на рис. 2.
Рис. 2. Условное обозначение инвертора
| Выпрямитель. Устройство и принцип действия выпрямителя. |
| Трансформатор. Устройство и принцип действия трансформатора. |
| Электродвигатель. Устройство и принцип действия электродвигателя. |