
Индуктивные уровнемеры. Устройство, принцип действия, типы и виды индуктивных уровнемеров.
Принцип действия индуктивных уровнемеров основан на зависимости индуктивности одиночной катушки или взаимной индуктивности двух катушек от глубины их погружения в электропроводную жидкость. Такая зависимость обусловлена возникновением в жидкости под воздействием магнитного поля переменного тока возбуждения вихревых токов, магнитное поле которых оказывает размагничивающее действие на поле тока возбуждения. Действительно, по определению индуктивность L катушки представляет собой отношение магнитного потока Ф к току I, создающему этот поток: L = Ф/I. При погружении катушки в жидкость в ней создаются вихревые токи, магнитное поле которых по закону Ленца направлено навстречу основному, т.е. результирующий магнитный поток будет меньше потока «сухой» катушки. Это означает, что индуктивность погруженной катушки меньше индуктивности сухой катушки.
Таким образом, если индуктивный преобразователь представляет собой одиночную длинную катушку, то ее индуктивность и полное сопротивление Z = R + jωL будут зависеть от глубины погружения (R — активное сопротивление катушки, ω — круговая частота тока возбуждения). Существуют индуктивные преобразователи, содержащие две индуктивно связанные катушки, образующие трансформатор (трансформаторные преобразователи).
При изменении индуктивностей L1 и L2 обеих катушек изменяется их взаимная индуктивность М ив соответствии с выражением М = k✓L1L2 , где k — коэффициент связи, определяемый потоками рассеяния.
В реальных конструкциях таких преобразователей обмотки выполняются намоткой в два провода, при этом L1 = L2 = L и k ≈ 1.
Из принципа действия уровнемеров видно, что они пригодны для измерения уровня только электропроводных сред. Кроме того, поскольку интенсивность вихревых токов зависит от электропроводности среды, ее изменение в процессе измерения вызовет появление дополнительной погрешности. Эти уровнемеры получили наибольшее распространение для измерения уровня жидкометаллического теплоносителя в энергетических установках.
Простейшая схема индуктивного трансформаторного преобразователя представлена на рис. 1, а. Преобразователь состоит из обмотки возбуждения 7, по которой протекает переменный ток возбуждения Iв, и вторичной обмотки 2, с которой снимается выходной сигнал Uвых. Преобразователь помещен в металлический защитный чехол 3, который герметично закреплен в крышке резервуара. Это позволяет осуществлять замену уровнемера без нарушения герметичности контура. Как уже указывалось, под действием потока возбуждения в толще контролируемой среды (например, жидкого металла) возникают вихревые токи. Это приводит к зависимости взаимной индуктивности М между обмотками от уровня металла. Эта зависимость линейна по всей длине обмоток, кроме концевых участков, длиной, равной их диаметру, где характеристика искривляется.
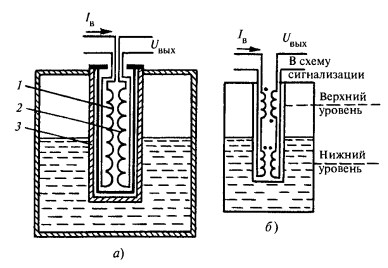
Рис. 1. Схема индуктивного трансформаторного преобразователя уровня:
а — аналогового уровнемера; 1 — обмотка возбуждения; 2 — вторичная обмотка; 3 — металлический защитный чехол; б — сигнализатора предельных значений уровня
Таким образом, ЭДС Е = ωМIв во вторичной обмотке, а следовательно, и выходное напряжение Uвых будут линейно зависеть от уровня. Из рис. 1, а видно, что взаимодействие полей возбуждения и вихревых токов осуществляется через металлический защитный чехол, который ослабляет поля и, следовательно, ухудшает чувствительность преобразователя, причем экранирующее действие чехла увеличивается с ростом частоты ω тока возбуждения Iв. Однако выбирать низкое значение ω нецелесообразно, так как при этом уменьшается ЭДС Е во вторичной обмотке, а следовательно, и Uвых (обычно частота выбирается равной 4...5 кГц).
Основной недостаток трансформаторных преобразователей уровня — влияние изменения температуры контролируемой среды на результат измерения. Это влияние обусловлено изменением активного сопротивления обмоток в зависимости от изменения температуры и изменением их индуктивности в связи с линейным расширением провода, а также изменением проводимости чехла и контролируемой среды. Кроме того, на результат измерения будут оказывать влияние изменения состава среды, а также изменение со временем свойств материалов чехла. При измерении уровня жидких металлов влияние будет оказывать также наличие на чехле пленки расплава или пленки оксидов. Автоматическая компенсация этих погрешностей представляет собой трудную задачу из-за сложности измерения влияющих величин и сложного характера влияния их на погрешность.
Преобразователи трансформаторного типа удобно использовать в качестве сигнализаторов предельных значений уровня. В этом случае преобразователь состоит из двух отдельных коротких трансформаторов, разнесенных на расстояние, равное разности верхнего и нижнего уровней (рис. 1, б). Первичные обмотки трансформаторов включены последовательно и питаются от одного источника. Вторичные обмотки включены встречно, и разностный сигнал идет в схему сигнализации. Срабатывание схемы аварийной сигнализации происходит при нулевом значении выходного напряжения Uвых, т.е. если ЭДС во вторичных обмотках трансформаторов будут равными. Очевидно, что это будет в том случае, если оба трансформатора окажутся одновременно либо ниже уровня (т.е. когда уровень достигнет верхнего аварийного значения), либо выше уровня (когда уровень достигнет нижнего аварийного значения). При промежуточных значениях уровня Uвых ≠ 0 и срабатывания схемы сигнализации не происходит.
Перечисленные факторы оказывают меньшее влияние на работу индуктивных уровнемеров дискретного действия. В таких уровнемерах фиксируется достижение определенных значений уровня, т.е. указатель переместится на соседнюю отметку только при изменении уровня на определенное значение — шаг дискретности. Преобразователь дискретного уровнемера представляет собой ряд коротких катушек индуктивности 1 (рис. 2, а), помещенных в виде столба внутри металлического чехла 2, отделяющего катушки от среды (рис. 2, б).
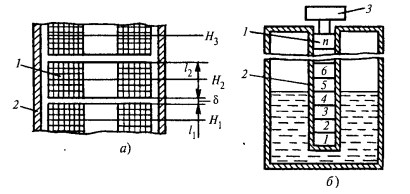
Рис. 2. Схема индуктивного преобразователя дискретных радарных уровнемеров:
а — фрагмент уровнемера; б — схема уровнемера; 1 — катушки индуктивности; 2 —металлический чехол; 3 — головка преобразователя
Как уже указывалось, индуктивность катушки зависит от глубины ее погружения в среду, поэтому индуктивность и комплексное сопротивление катушки, расположенной ниже уровня, имеет другое значение, чем катушки, расположенной выше уровня. В головке преобразователя 3 располагаются вспомогательные катушки, индуктивность которых от уровня не зависит. Все рабочие 1, 2, 3, ..., n и вспомогательные катушки включены в следящую логическую схему, которая отыскивает первую сверху катушку, расположенную ниже уровня. Это дает возможность судить о положении уровня, если известны размеры катушек и их положение относительно дна резервуара. Принципиально важным является то обстоятельство, что следящая система не измеряет непосредственно индуктивности рабочих катушек, а отыскивает две соседние катушки с резко различающимися индуктивностями (это имеет место, если одна из них расположена ниже уровня металла, а вторая — выше), причем количественное различие индуктивностей роли не играет. Это означает, что следящая система работает в релейном режиме, обеспечивающем высокую помехозащищенность дискретных индуктивных уровнемеров.
Рассмотрим рис. 2, а. Предположим, что индуктивность катушки изменяется скачком при прохождении уровня через ее середину. Из этого следует, что при изменении уровня в интервале Н1 - Н2 или Н2 - Н3. Индуктивности катушек не изменяются, т.е. показания приборов также не изменяются. Изменение показаний происходят только при достижении уровнем значений Н1,Н2.
Таким образом, шаг дискретности уровнемера будет равен Н2 - Н1, H3 - Н2 и т.д. Очевидно, что погрешность Δ измерения, вызванная дискретностью, будет определяться длиной I соседних катушек и расстоянием δ между ними Δ = δ + (l1 + l2)/2. Это дает возможность обеспечить высокую точность измерения за счет уменьшения длины катушек и расстояния между ними на рабочих участках изменения уровня (на остальных участках длина катушек может быть увеличенной).
Изменение свойств контролируемого жидкого металла (в том числе и за счет изменения температуры), а также налипший на чехол слой металла или его оксидов не приведет к нарушению работоспособности прибора. Действительно, перечисленные факторы могут только уменьшить степень изменения индуктивности катушек, погруженных в металл относительно «сухих», что не влияет на работу следящей системы. Суммируя сказанное, можно перечислить достоинства дискретных индуктивных уровнемеров: независимость показаний от изменения температуры среды и наличия на чехле пленок расплава или окислов (при измерении уровня металла).
В настоящее время выпускаются дискретные индуктивные уровнемеры типа КВАНТ-10, предназначенные для измерения уровня жидкометаллического теплоносителя с температурой до 550 °С и давлением до 1,5 МПа. В зависимости от диапазона измерения основная погрешность равна ±2,5 или ±4 %. Дискретный индуктивный метод измерения используется в уровнемере КВАНТ-11, предназначенном для измерения уровня воды при температуре насыщения с небольшим паросодержанием. В таких уровнемерах ферромагнитный поплавок, занимая положение против какой-либо катушки, увеличивает ее индуктивность. Логическая схема уровнемера отыскивает эту катушку и по ее расположению и известным геометрическим размерам преобразователя определяет уровень. При диапазоне измерения 0...3 м основная погрешность уровнемера ±50 мм.