
Теория электротехники
30.05.11 |
Электродвигатель. Устройство и принцип действия электродвигателя.
Электродвигатель преобразует электроэнергию в энергию механического движения. Так же как и электрический генератор электродвигатель состоит обычно из статора и ротора, относясь к вращающимся электрическим машинам Выпускаются однако, двигатели у которых движущаяся часть совершает линейное (обычно прямолинейное движение (линейные двигатели).
Самым распространенным видом электродвигателей является трехфазный короткозамкнутый асинхронный двигатель принцип устройства которого представлен на рис. 1, роторная обмотка этого двигателя представляет собой систему массивных медных или алюминиевых стержней, размещенных параллельно друг другу в пазах ротора концы которых соединены между собой короткозамкнутыми кольцами.
Рис. 1. Принцип устройства короткозамкнутого асинхронного двигателя.
1- статор, 2 – ротор, 3 - вал, 4 - корпус
В случае применения алюминия вся обмотка (беличья клетка) обычно формируется путем литья под давлением. Вращающееся магнитное поле статора индуцирует в обмотке ротора ток, взаимодействие которого с магнитным полем статора приводит ротор во вращение. Скорость вращения ротора при этом всегда меньше чем магнитного поля статора и ее относительную разность со скоростью вращения магнитного поля статора (с синхронией скоростью) называют скольжением. Эта величина зависит от нагрузки на валу двигателя и составляет при полной нагрузке обычно 3… 5%. Для ступенчатого регулирования скорости может использоваться статорная обмотка с переключаемым числом полюсов по такому принципу могут выполняться, например, двух трех и четырехскоростные асинхронные двигатели. Для плавного регулирования скорости обычно осуществляется питание двигателя через регулируемый преобразователь частоты.
Для главного регулирования скорости асинхронного двигателя ниже номинальной ранее вместо короткозамкнутых двигателе использовались двигатели с фазным ротором, у которых роторная обмотка имеет такое же трехфазное исполнение как и статорная. Такая обмотка соединяется через контактные кольца, расположенные на валу двигателя с регулировочным реостатом где часть энергии потребляемой двигателем, превращается в тепло. Регулирование происходит, следовательно, за счет снижения КПД двигателя и в настоящее время применяется редко.
Короткозамкнутые асинхронные двигатели характеризуются своей компактностью и высокой надежностью, а также намного большим сроком службы, чем двигатели внутреннего сгорания. По размерам они обычно меньше и по массе легче, чем двигатели внутреннего сгорания той же мощности. Они могут изготовляться в очень большом диапазоне номинальных мощностей от нескольких ватт до нескольких десятков мегаватт. Двигатели малой мощности (до нескольких сотен ватт могут быть и однофазными.
Синхронные двигатели устроены так же, как и синхронные генераторы. При неизменной сетевой частоте они вращаются с постоянной скоростью не зависимо от нагрузки. Их преимуществом перед асинхронными двигателями считается то, что они не потребляют из сети реактивную энергию, а могут отдавать ее в сеть покрывая этим потребление реактивной энергии другими электроприемниками. Синхронные двигатели не подходят для частых пусков и применяются, главным образом, при относительно стабильной механической нагрузке и тогда, когда требуется постоянная скорость вращения.
Двигатели постоянного тока используются при необходимости плавного регулирования скорости. Это достигается путем изменения тока якоря и/или возбуждения при помощи полупроводниковых устройств (раньше - с помощью регулировочных реостатов) или путем изменения напряжения питания. Так как в настоящее время легко и без существенного изменения КПД (при помощи преобразователей частоты) осуществляется и плавное регулирование скорости двигателей переменного тока, то двигатели постоянного тока, из-за их большей стоимости, больших размеров и дополнительных потерь, возникающих при регулировании, стали применяться значительно реже, чем раньше.
Шаговые двигатели приводят в движение при помощи импульсов напряжения. При каждом импульсе ротор двигателя поворачивается на определенный угол (например, на несколько градусов). Такие двигатели используются в тихоходных механизмах, требующих обычно еще точного позиционирования. Могут изготовляться, например, двигатели, совершающие один обо рот за сутки или даже за год.
Линейные двигатели используются для линейного движения, когда преобразование вращающегося движения в линейное при помощи механических передач или других устройств невозможно или неприемлемо. Наиболее часто применяются асинхронные линейные двигатели, но существуют также синхронные и шаговые линейные двигатели и даже двигатели постоянного тока.
Основными преимуществами электрических двигателей перед двигателями внутреннего сгорания могут считаться
- меньшие размеры, меньшая масса и меньшая стоимость,
- намного более высокий КПД (обычно 90 ..95%),
- лучшая регулируемость (обычно с сохранением высокого КПД),
- высокая надежность и долгий срок службы,
- меньший шум и меньшая вибрация при работе,
- быстрый и беспроблемный (при необходимости - плавный) пуск,
- намного более простая эксплуатация,
- отсутствие потребления топлива и, как результат, отсутствие выбросов продуктов сгорания в окружающую среду,
- легкое присоединение к любым рабочим машинам и механизмам.
Применение электродвигателей может оказаться проблемным в случае, когда они должны размещаться на переносных и передвижных устройствах или на транспортных средствах. Для электропитания в таких случаях могут применяться, в зависимости от дальности и характера передвижения,
- гибкие кабели,
- контактные провода или контактные шины,
- размещаемые на передвижных средствах источники питания (аккумуляторы, топливные элементы, двигатель-генераторы и т. п.).
Во многих случаях эти способы питания ограничивают маневренность или дальность пробега транспортных средств (особенно автомобилей) или других передвижных машин в такой степени что применение двигателей внутреннего сгорания остается более рациональным. Первый электродвигатель был не электромагнитным, а электростатическим и его изготовил в 1748 году издатель и общественный деятель города Филадельфия (Philadelphia, США) Бенджамин Франклин (Benjamin Franklin, 1706-1790). Ротор этого двигателя представлял собой зубчатый диск, на зубья которого действовали импульсные силы притяжения и отталкивания, вызываемые электростатическими разрядами, диск совершал 12...15 оборотов в минуту и мог нести до 100 серебряных монет. Первые электромагнитные двигатели (приборы, в которых либо проводник, через который протекал ток вращался вокруг стержневого магнита (рис. 2), совершая при этом работу - перемешивая ртуть, либо стержневой магнит вращался вокруг проводника с током, изобрел в 1821 году ассистент Лондонского Королевского института (Royal Institution) Майкл Фарадей (Michael Faraday).
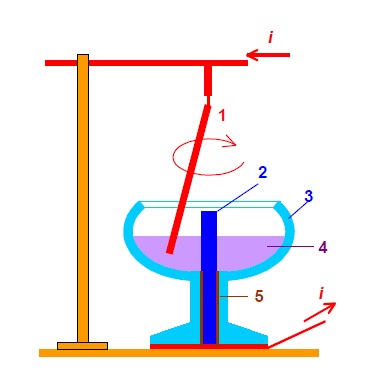
Рис. 2. Принцип устройства опытного прибора Майкла Фарадея для демонстрации электрического вращения.
1 - вращающийся металлический стержень, 2 - стержневой магнит, 3 - стеклянный или фарфоровый сосуд, 4 - ртуть, 5 – уплотнение, i - ток
Первый (качающийся) двигатель, который, в принципе, можно было бы соединить с приводимой рабочей машиной, изготовил в 1831 году учитель математики и природоведения школы мальчиков города Албани (Albany, США) Джозеф Генри (Joseph Henry, 1797-1878); принцип устройства этого двигателя представлен на рис. 3.
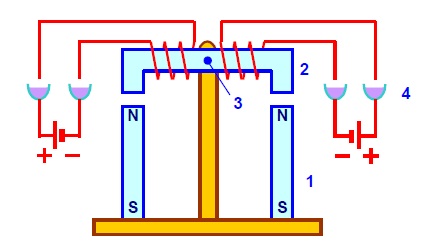
Рис. 3. Принцип устройства качающегося электродвигателя Джозефа Генри.
1 - постоянные магниты, 2 - качающийся электромагнит, 3 - вал, 4 - ртутные контакты.
После двигателя Генри было создано еще несколько различных опытных электродвигателей возвратно-поступательного движения. Первый вращающийся электродвигатель создал с целью реального применения 8 апреля 1834 года инспектор порта Пиллау rPiilau, Восточная Пруссия), инженер-строитель Мориц Герман Яко6и (Moritz Hermann Jacobi. 1801-1874), изучавший самостоятельно электротехнику в библиотеке и в лабораториях Кенигсбергского университета. Восьмиполюсный двигатель, у которого как статор, так и ротор состояли из четырех подковообразных электромагнитов и который совершал 80… 120 оборотов в минуту, получал питание из батареи гальванических элементов напряжением 6V. Мощность его на валу была приблизительно 15 W а КПД - около 13%. Якоби исследовал и совершенствовал свои двигатель, между прочим, в Тартуском университете, профессором гражданской архитектуры которого он был избран в 1835 году.
Мориц Герман (позже, в России - Борис Семенович) Якоби родился в 1801 году в Потсдаме (Potsdam, Германия) в зажиточной семье и получил хорошее домашнее образование; уже в юношестве он одинаково свободно владел немецким, английским и французским языками и отлично знал также латынь и древнегреческий язык. В 1828 году он окончил Геттингенский университет (Gottingen Германия) с квалификацией архитектора, работал затем на строительстве дорог, а в 1833 году переехал в Кенигсберг, где его младший брат Карл Густав Яков Якоби (Carl Gustav Jacob Jacobi, 1804-1851) был профессором математики. Он стал работать инспектором порта Пиллау и посещать Кенигсбергский университет для приобретения знаний по электротехнике. В 1834 году он построил вышеупомянутый двигатель, а в 1835 году, по инициативе профессора астрономии Тартуского университета Фридриха Георга Вильгельма Струве (Friedrich Georg Wilhelm Struve, 1793-1864) он был избран профессором гражданской архитектуры этого университета. Его двигатель вызвал интерес в Петербурге, и в 1837 году Якоби был прикомандирован к столичной Академии Наук для разработки электропривода военных кораблей, оставаясь до 1840 года официально на службе в Тартуском университете. В 1838 году Якоби испытал на Неве первый в мире электропривод с вращающимся двигателем (установленный на морском боте), но дальнейшие исследования показали, что для электропитания привода, к сожалению, нет технически и экономически пригодного источника энергии.
В 1839 году Якоби был избран членом-корреспондентом, а в 1842 году - членом Академии Наук и в дальнейшем занимался, в основном, развитием электромагнитного телеграфа, гальванотехники и метрологии. Неоднократно он встречался с Майклом Фарадеем, известными французскими и немецкими физиками того времени.
В середине 19-го века было разработано еще несколько разновидностей двигателей постоянного тока, но их практическому применению воспрепятствовали малая мощность и, как установил уже Якоби, недостаточная экономическая эффективность источников электропитания того времени - гальванических элементов и примитивных электромашинных генераторов. Более широко применение электродвигателей стало возможным только в 1866 году после появления генераторов постоянного тока с самовозбуждением .
После появления многофазной системы переменного тока немецкая фирма АЭГ стала исследовать возможности использования асинхронных двигателей, изобретенных ее главным инженером Михаилом Доливо-Добровольским (на немецкий лад Michael von Dolivo-Dobrowolsky) и представил 8 марта 1889 заявление на патентование короткозамкнутого асинхронного двигателя. После этого началось широкое применение надежных и высокоэффективных двигателей переменного тока. В настоящее время все вышеназванные электродвигатели достигли очень высокого технического уровня и находят широчайшее применение в стационарных установках, а в последнее время все чаще и в средствах передвижения.
Самым распространенным видом электродвигателей является трехфазный короткозамкнутый асинхронный двигатель принцип устройства которого представлен на рис. 1, роторная обмотка этого двигателя представляет собой систему массивных медных или алюминиевых стержней, размещенных параллельно друг другу в пазах ротора концы которых соединены между собой короткозамкнутыми кольцами.
Рис. 1. Принцип устройства короткозамкнутого асинхронного двигателя.
1- статор, 2 – ротор, 3 - вал, 4 - корпус
В случае применения алюминия вся обмотка (беличья клетка) обычно формируется путем литья под давлением. Вращающееся магнитное поле статора индуцирует в обмотке ротора ток, взаимодействие которого с магнитным полем статора приводит ротор во вращение. Скорость вращения ротора при этом всегда меньше чем магнитного поля статора и ее относительную разность со скоростью вращения магнитного поля статора (с синхронией скоростью) называют скольжением. Эта величина зависит от нагрузки на валу двигателя и составляет при полной нагрузке обычно 3… 5%. Для ступенчатого регулирования скорости может использоваться статорная обмотка с переключаемым числом полюсов по такому принципу могут выполняться, например, двух трех и четырехскоростные асинхронные двигатели. Для плавного регулирования скорости обычно осуществляется питание двигателя через регулируемый преобразователь частоты.
Для главного регулирования скорости асинхронного двигателя ниже номинальной ранее вместо короткозамкнутых двигателе использовались двигатели с фазным ротором, у которых роторная обмотка имеет такое же трехфазное исполнение как и статорная. Такая обмотка соединяется через контактные кольца, расположенные на валу двигателя с регулировочным реостатом где часть энергии потребляемой двигателем, превращается в тепло. Регулирование происходит, следовательно, за счет снижения КПД двигателя и в настоящее время применяется редко.
Короткозамкнутые асинхронные двигатели характеризуются своей компактностью и высокой надежностью, а также намного большим сроком службы, чем двигатели внутреннего сгорания. По размерам они обычно меньше и по массе легче, чем двигатели внутреннего сгорания той же мощности. Они могут изготовляться в очень большом диапазоне номинальных мощностей от нескольких ватт до нескольких десятков мегаватт. Двигатели малой мощности (до нескольких сотен ватт могут быть и однофазными.
Синхронные двигатели устроены так же, как и синхронные генераторы. При неизменной сетевой частоте они вращаются с постоянной скоростью не зависимо от нагрузки. Их преимуществом перед асинхронными двигателями считается то, что они не потребляют из сети реактивную энергию, а могут отдавать ее в сеть покрывая этим потребление реактивной энергии другими электроприемниками. Синхронные двигатели не подходят для частых пусков и применяются, главным образом, при относительно стабильной механической нагрузке и тогда, когда требуется постоянная скорость вращения.
Двигатели постоянного тока используются при необходимости плавного регулирования скорости. Это достигается путем изменения тока якоря и/или возбуждения при помощи полупроводниковых устройств (раньше - с помощью регулировочных реостатов) или путем изменения напряжения питания. Так как в настоящее время легко и без существенного изменения КПД (при помощи преобразователей частоты) осуществляется и плавное регулирование скорости двигателей переменного тока, то двигатели постоянного тока, из-за их большей стоимости, больших размеров и дополнительных потерь, возникающих при регулировании, стали применяться значительно реже, чем раньше.
Шаговые двигатели приводят в движение при помощи импульсов напряжения. При каждом импульсе ротор двигателя поворачивается на определенный угол (например, на несколько градусов). Такие двигатели используются в тихоходных механизмах, требующих обычно еще точного позиционирования. Могут изготовляться, например, двигатели, совершающие один обо рот за сутки или даже за год.
Линейные двигатели используются для линейного движения, когда преобразование вращающегося движения в линейное при помощи механических передач или других устройств невозможно или неприемлемо. Наиболее часто применяются асинхронные линейные двигатели, но существуют также синхронные и шаговые линейные двигатели и даже двигатели постоянного тока.
Основными преимуществами электрических двигателей перед двигателями внутреннего сгорания могут считаться
- меньшие размеры, меньшая масса и меньшая стоимость,
- намного более высокий КПД (обычно 90 ..95%),
- лучшая регулируемость (обычно с сохранением высокого КПД),
- высокая надежность и долгий срок службы,
- меньший шум и меньшая вибрация при работе,
- быстрый и беспроблемный (при необходимости - плавный) пуск,
- намного более простая эксплуатация,
- отсутствие потребления топлива и, как результат, отсутствие выбросов продуктов сгорания в окружающую среду,
- легкое присоединение к любым рабочим машинам и механизмам.
Применение электродвигателей может оказаться проблемным в случае, когда они должны размещаться на переносных и передвижных устройствах или на транспортных средствах. Для электропитания в таких случаях могут применяться, в зависимости от дальности и характера передвижения,
- гибкие кабели,
- контактные провода или контактные шины,
- размещаемые на передвижных средствах источники питания (аккумуляторы, топливные элементы, двигатель-генераторы и т. п.).
Во многих случаях эти способы питания ограничивают маневренность или дальность пробега транспортных средств (особенно автомобилей) или других передвижных машин в такой степени что применение двигателей внутреннего сгорания остается более рациональным. Первый электродвигатель был не электромагнитным, а электростатическим и его изготовил в 1748 году издатель и общественный деятель города Филадельфия (Philadelphia, США) Бенджамин Франклин (Benjamin Franklin, 1706-1790). Ротор этого двигателя представлял собой зубчатый диск, на зубья которого действовали импульсные силы притяжения и отталкивания, вызываемые электростатическими разрядами, диск совершал 12...15 оборотов в минуту и мог нести до 100 серебряных монет. Первые электромагнитные двигатели (приборы, в которых либо проводник, через который протекал ток вращался вокруг стержневого магнита (рис. 2), совершая при этом работу - перемешивая ртуть, либо стержневой магнит вращался вокруг проводника с током, изобрел в 1821 году ассистент Лондонского Королевского института (Royal Institution) Майкл Фарадей (Michael Faraday).
Рис. 2. Принцип устройства опытного прибора Майкла Фарадея для демонстрации электрического вращения.
1 - вращающийся металлический стержень, 2 - стержневой магнит, 3 - стеклянный или фарфоровый сосуд, 4 - ртуть, 5 – уплотнение, i - ток
Первый (качающийся) двигатель, который, в принципе, можно было бы соединить с приводимой рабочей машиной, изготовил в 1831 году учитель математики и природоведения школы мальчиков города Албани (Albany, США) Джозеф Генри (Joseph Henry, 1797-1878); принцип устройства этого двигателя представлен на рис. 3.
Рис. 3. Принцип устройства качающегося электродвигателя Джозефа Генри.
1 - постоянные магниты, 2 - качающийся электромагнит, 3 - вал, 4 - ртутные контакты.
После двигателя Генри было создано еще несколько различных опытных электродвигателей возвратно-поступательного движения. Первый вращающийся электродвигатель создал с целью реального применения 8 апреля 1834 года инспектор порта Пиллау rPiilau, Восточная Пруссия), инженер-строитель Мориц Герман Яко6и (Moritz Hermann Jacobi. 1801-1874), изучавший самостоятельно электротехнику в библиотеке и в лабораториях Кенигсбергского университета. Восьмиполюсный двигатель, у которого как статор, так и ротор состояли из четырех подковообразных электромагнитов и который совершал 80… 120 оборотов в минуту, получал питание из батареи гальванических элементов напряжением 6V. Мощность его на валу была приблизительно 15 W а КПД - около 13%. Якоби исследовал и совершенствовал свои двигатель, между прочим, в Тартуском университете, профессором гражданской архитектуры которого он был избран в 1835 году.
Мориц Герман (позже, в России - Борис Семенович) Якоби родился в 1801 году в Потсдаме (Potsdam, Германия) в зажиточной семье и получил хорошее домашнее образование; уже в юношестве он одинаково свободно владел немецким, английским и французским языками и отлично знал также латынь и древнегреческий язык. В 1828 году он окончил Геттингенский университет (Gottingen Германия) с квалификацией архитектора, работал затем на строительстве дорог, а в 1833 году переехал в Кенигсберг, где его младший брат Карл Густав Яков Якоби (Carl Gustav Jacob Jacobi, 1804-1851) был профессором математики. Он стал работать инспектором порта Пиллау и посещать Кенигсбергский университет для приобретения знаний по электротехнике. В 1834 году он построил вышеупомянутый двигатель, а в 1835 году, по инициативе профессора астрономии Тартуского университета Фридриха Георга Вильгельма Струве (Friedrich Georg Wilhelm Struve, 1793-1864) он был избран профессором гражданской архитектуры этого университета. Его двигатель вызвал интерес в Петербурге, и в 1837 году Якоби был прикомандирован к столичной Академии Наук для разработки электропривода военных кораблей, оставаясь до 1840 года официально на службе в Тартуском университете. В 1838 году Якоби испытал на Неве первый в мире электропривод с вращающимся двигателем (установленный на морском боте), но дальнейшие исследования показали, что для электропитания привода, к сожалению, нет технически и экономически пригодного источника энергии.
В 1839 году Якоби был избран членом-корреспондентом, а в 1842 году - членом Академии Наук и в дальнейшем занимался, в основном, развитием электромагнитного телеграфа, гальванотехники и метрологии. Неоднократно он встречался с Майклом Фарадеем, известными французскими и немецкими физиками того времени.
В середине 19-го века было разработано еще несколько разновидностей двигателей постоянного тока, но их практическому применению воспрепятствовали малая мощность и, как установил уже Якоби, недостаточная экономическая эффективность источников электропитания того времени - гальванических элементов и примитивных электромашинных генераторов. Более широко применение электродвигателей стало возможным только в 1866 году после появления генераторов постоянного тока с самовозбуждением .
После появления многофазной системы переменного тока немецкая фирма АЭГ стала исследовать возможности использования асинхронных двигателей, изобретенных ее главным инженером Михаилом Доливо-Добровольским (на немецкий лад Michael von Dolivo-Dobrowolsky) и представил 8 марта 1889 заявление на патентование короткозамкнутого асинхронного двигателя. После этого началось широкое применение надежных и высокоэффективных двигателей переменного тока. В настоящее время все вышеназванные электродвигатели достигли очень высокого технического уровня и находят широчайшее применение в стационарных установках, а в последнее время все чаще и в средствах передвижения.
| Электрические моторы (двигатели). Мощность, вращение, момент, нагрузка электродвигателя. |
| Свет: основные понятия и их практическое применение |
| Что такое БКТП? |