
Преобразователь частоты. Устройство, принцип работы, схемы управления и расчеты преобразователя частоты, инвертора.
Преобразователи частоты
С конца 1960-х годов преобразователи частоты изменились коренным образом, в основном, как результат разработки микропроцессорных и полупроводниковых технологий, а также благодаря снижению их стоимости.
Однако основополагающие принципы, заложенные в преобразователях частоты, остались прежними.
В состав преобразователей частоты входят четыре основных элемента:
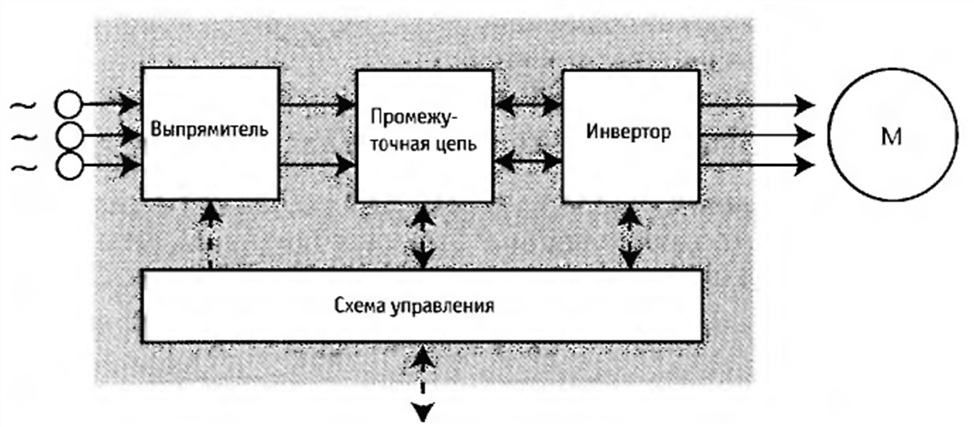
Рис. 1. Блок-схема преобразователя частоты
1.Выпрямитель формирует пульсирующее напряжение постоянного тока при его подключении к одно/трехфазной питающей электросети переменного тока. Выпрямители бывают двух основных типов - управляемые и неуправляемые.
2.Промежуточная цепь одного из трех типов:
a) преобразующая напряжение выпрямителя в постоянный ток.
b) стабилизирующая или сглаживающая пульсирующее напряжение постоянного тока и подающая его на инвертор.
c) преобразующая неизменное напряжение постоянного тока выпрямителя в изменяющееся напряжение переменного тока.
3.Инвертор, который формирует частоту напряжения электродвигателя. Некоторые инверторы могут также конвертировать неизменное напряжение постоянного тока в изменяющееся напряжение переменного тока.
4. Электронная схема управления, которая посылает сигналы в выпрямитель, промежуточную цепь и инвертор и получает сигналы от данных элементов. Построение управляемых элементов зависит от конструкции конкретного преобразователя частоты (см. рис. 2.02).
Общим для всех преобразователей частоты является то, что все цепи управления управляют полупроводниковыми элементами инвертера. Преобразователи частоты различаются по режиму коммутации, используемому для регулирования напряжения питания электродвигателя.
На рис. 2, где показаны различные принципы построения/управления преобразователя, используются следующие обозначения:
1- управляемый выпрямитель,
2- неуправляемый выпрямитель,
3- промежуточная цепь изменяющегося постоянного тока,
4- промежуточная цепь неизменного напряжения постоянного тока
5- промежуточная цепь изменяющегося постоянного тока,
6- инвертор с амплитудно-импульсной модуляцией (АИМ)
7- инвертор с широтно-импульсной модуляцией (ШИМ)
Инвертор тока (ИТ) (1+3+6)
Преобразователь с амплитудно-импульсной модуляцией (АИМ) (1+4+7) (2+5+7)
Преобразователь с широтно-импульсной модуляцией (ШИМ/VVCplus) (2+4+7)
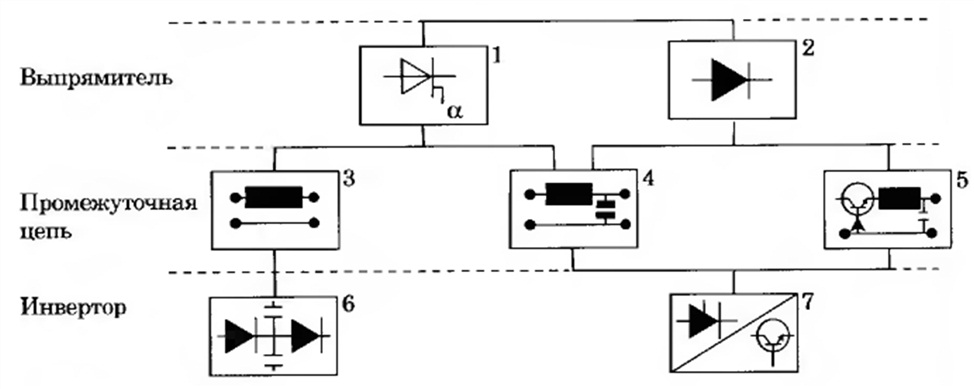
Рис. 2. Различные принципы построения/управления преобразователей частоты
Для полноты следует упомянуть прямые преобразователи, которые не имеют промежуточной цепи. Такие преобразователи используются в мегаваттном диапазоне мощности для формирования низкочастотного питающего напряжения непосредственно из сети частотой 50 Гц, при этом их максимальная выходная частота составляет около 30 Гц.
Выпрямитель
Питающее напряжение сети является трехфазным или однофазным напряжением переменного тока с фиксированной частотой (например, 3x400 В/50 Гц или 1 х240 В/50 Гц); характеристики этих напряжений иллюстрируются приведенным ниже рисунком.
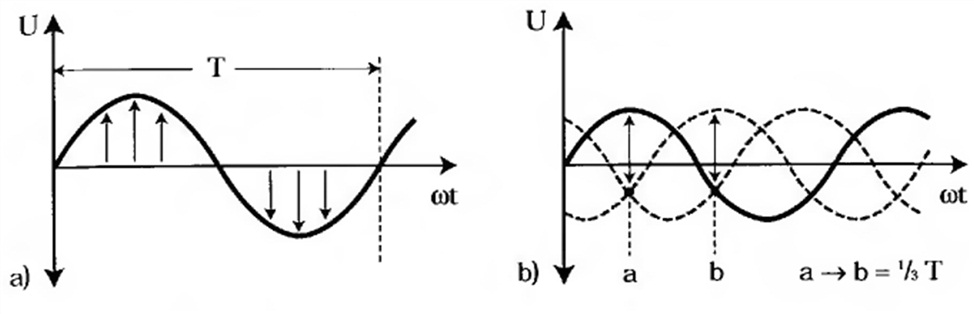
Рис. 3. Однофазное и трехфазное напряжение переменного тока
На рисунке все три фазы смещены между собой по времени, фазное напряжение постоянно изменяет направление, а частота указывает число периодов в секунду. Частота 50 Гц означает, что на секунду приходится 50 периодов (50 х Т), т.е. один период длится 20 миллисекунд.
Выпрямитель преобразователя частоты строится либо на диодах, либо на тиристорах, либо на их комбинации. Выпрямитель, построенный на диодах, является неуправляемым, а на тиристорах - управляемым. Если используются и диоды, и тиристоры, выпрямитель является полууправляемым.
Неуправляемые выпрямители
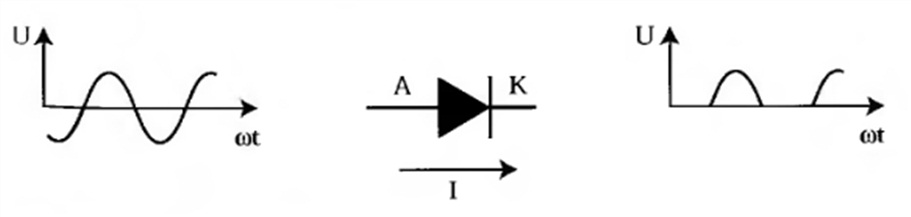
Рис. 4. Режим работы диода.
Диоды позволяют току протекать только в одном направлении: от анода (А) к катоду (К). Как и в случае некоторых других полупроводниковых приборов, величину тока диода регулировать невозможно. Напряжение переменного тока преобразуется диодом в пульсирующее напряжение постоянного тока. Если неуправляемый трехфазный выпрямитель питается трехфазным напряжением переменного тока, то и в этом случае напряжение постоянного тока будет пульсировать.
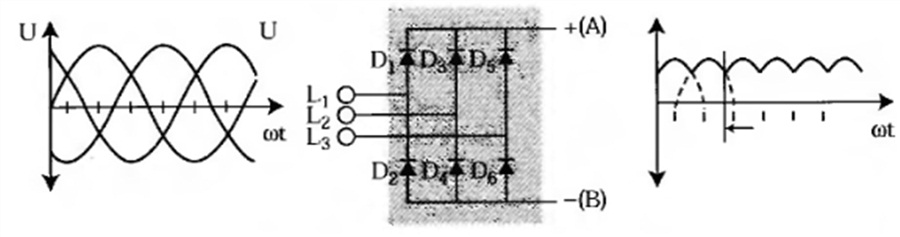
Рис. 5. Неуправляемый выпрямитель
На рис. 5 показан неуправляемый трехфазный выпрямитель, содержащий две группы диодов. Одна группа состоит из диодов D1, D3 и D5. Другая группа состоит из диодов D2, D4 и D6. Каждый диод проводит ток в течение трети времени периода (120°). В обеих группах диоды проводят ток в определенной последовательности. Периоды, в течение которых обе группы работают, смещены между собой на 1 /6 времени периода Т (60°).
Диоды D1,3,5 открыты (проводят), когда к ним приложено положительное напряжение. Если напряжение фазы L достигает положи-тельного пикового значения, то диод D, открыт и клемма А получает напряжение фазы L1 На два других диода будут действовать обратные напряжения величиной UL1-2 и UL1-3
То же происходит и в группе диодов D2,4,6. В этом случае клемма В получает отрицательное фазное напряжение. Если в данный момент фаза L3 достигает предельного отрицательного значения, диод D6 открыт (проводит). На оба других диода действуют обратные напряжения величиной UL3-1 и UL3-2
Выходное напряжение неуправляемого выпрямителя равно разности напряжений этих двух диодных групп. Среднее значение пульсирующего напряжения постоянного тока равно 1,35 х напряжение сети.
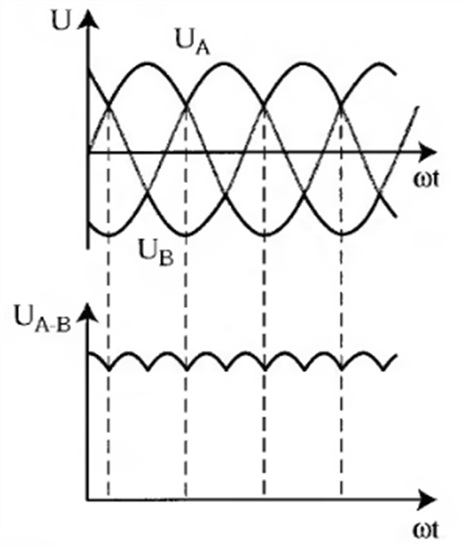
Рис. 6. Выходное напряжение неуправляемого трехфазного выпрямителя
Управляемые выпрямители
В управляемых выпрямителях диоды заменены тиристорами. Подобно диоду тиристор пропускает ток только в одном направлении - от анода (А) к катоду (К). Однако в противоположность диоду тиристор имеет третий электрод, называемый «затвором» (G). Чтобы тиристор открылся, на затвор должен быть подан сигнал. Если через тиристор течет ток, тиристор будет пропускать его до тех пор, пока ток не станет равным нулю.
Ток не может быть прерван подачей сигнала на затвор. Тиристоры используются как в выпрямителях, так и в инверторах.
На затвор тиристора подается управляющий сигнал а, который характеризуется задержкой, выражаемой в градусах. Эти градусы оказывают запаздывание между моментом перехода напряжения через нуль и временем, когда тиристор открыт.
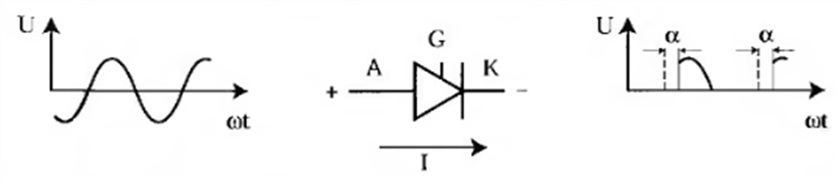
Рис. 7. Режим работы тиристора
Если угол а находится в пределах от 0° до 90°, то тиристорная схема используется в качестве выпрямителя, а если в пределах от 90° до 300° - то в качестве инвертора.
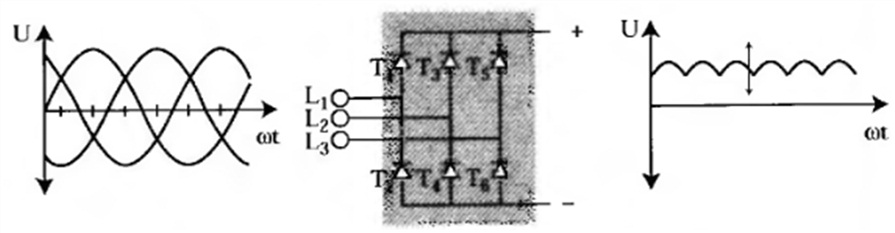
Рис. 8. Управляемый трехфазный выпрямитель
Управляемый выпрямитель в своей основе не отличается от неуправляемого за исключением того, что тиристор управляется сигналом а и начинает проводить с момента, когда начинает проводить обычный диод, до момента, который находится на 30° позже точки перехода напряжения через нуль.
Регулирование значения а позволяет изменять величину выпрямленного напряжения. Управляемый выпрямитель формирует постоянное напряжение, среднее значение которого равно 1,35 х напряжение сети x cos α
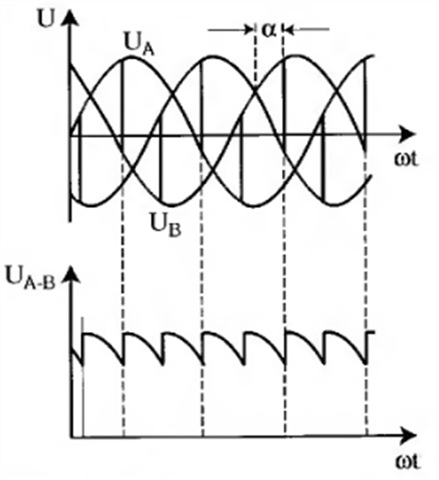
Рис. 9. Выходное напряжение управляемого трехфазного выпрямителя
По сравнению с неуправляемым выпрямителем управляемый имеет более значительные потери и вносит более высокие помехи в сеть питания, поскольку при более коротком времени пропускания тиристоров выпрямитель отбирает от сети больший реактивный ток.
Преимуществом управляемых выпрямителей является их способность возвращать энергию в питающую сеть.
Промежуточная цепь
Промежуточную цепь можно рассматривать как хранилище, из которого электродвигатель может получать энергию через инвертор. В зависимости от выпрямителя и инвертора, возможны три принципа построения промежуточной цепи.
Инверторы - источники тока (1-преобразователи)
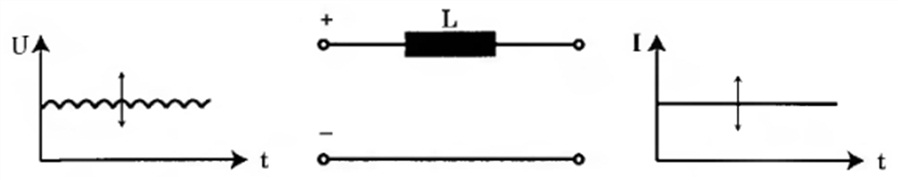
Рис. 10. Промежуточная цепь изменяющегося постоянного тока
В случае инверторов - источников тока промежуточная цепь содержит катушку большой индуктивности и сопрягается только с управляемым выпрямителем. Катушка индуктивности преобразует изменяющееся напряжение выпрямителя в изменяющийся постоянный ток. Величину напряжения электродвигателя определяет нагрузка.
Инверторы - источники напряжения (U-преобразователи)
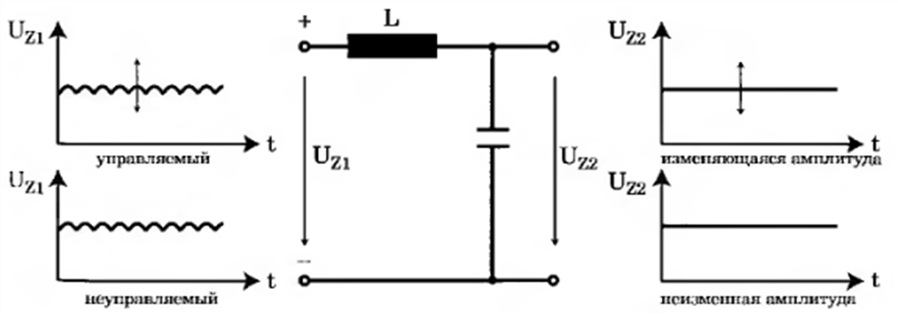
Рис. 11. Промежуточная цепь постоянного напряжения
В случае инверторов - источников напряжения промежуточная цепь представляет собой фильтр, содержащий конденсатор, и может сопрягаться с выпрямителем любого из двух типов. Фильтр сглаживает пульсирующее постоянное напряжение (U21) выпрямителя.
В управляемом выпрямителе напряжение на данной частоте постоянно и подается на инвертор в качестве истинного постоянного напряжения (U22)c изменяющейся амплитудой.
В неуправляемых выпрямителях напряжение на входе инвертора представляет собой постоянное напряжение с неизменной амплитудой.
Промежуточная цепь изменяющегося постоянного напряжения
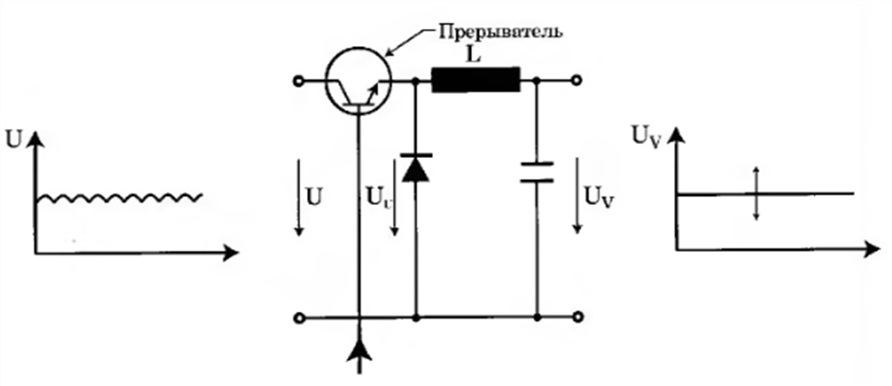
Рис. 12. Промежуточная цепь изменяющегося напряжения
В промежуточных цепях изменяющегося постоянного напряжения можно перед фильтром включить прерыватель, как это показано на рис. 12.
Прерыватель содержит транзистор, который действует как переключатель, включая и выключая напряжение выпрямителя. Система регулирования управляет прерывателем путем сравнения изменяющегося напряжения после фильтра (Uv) с входным сигналом. Если существует разность, соотношение регулируется путем изменения времени, в течение которого транзистор открыт, и времени, когда он закрыт. Тем самым изменяется эффективное значение и величина постоянного напряжения, что может быть выражено формулой
Uv = U х ton / (ton + toff)
Когда транзистор прерывателя размыкает цепь тока, катушка индуктивности фильтра делает напряжение на транзисторе бесконечно большим. Чтобы избежать этого прерыватель защищен быстропереключающимся диодом. Когда транзистор открывается и закрывается, как показано на рис. 13, напряжение будет наибольшим в режиме 2.
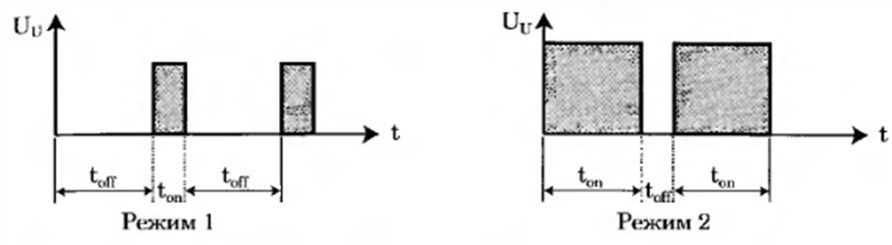
Рис. 13. Транзистор-прерыватель управляет напряжением промежуточной цепи
Фильтр промежуточной цепи сглаживает прямоугольное напряжение после прерывателя. Конденсатор и катушка индуктивности фильтра поддерживают постоянство напряжения на данной частоте.
В зависимости от построения промежуточная цепь может также выполнять дополнительные функции, в число которых входят:
• развязка выпрямителя от инвертора
• уменьшение уровня гармоник
• накопление энергии с целью ограничения скачков прерывистой нагрузки.
Инвертор
Инвертор - последнее звено в преобразователе частоты перед электродвигателем и место, где происходит окончательная адаптация выходного напряжения.
Преобразователь частоты обеспечивает штатные рабочие условия во всем диапазоне регулирования путем адаптации выходного напряжения к режиму нагрузки. Это позволяет поддерживать оптимальное намагничивание электродвигателя.
Из промежуточной цепи инвертор получает
• изменяющийся постоянный ток,
• изменяющееся напряжение постоянного тока или
• неизменное напряжение постоянного тока.
Благодаря инвертору, в каждом из этих случаях на электродвигатель подается изменяющаяся величина. Другими словами, в инверторе всегда создается нужная частота напряжения, подаваемого на электродвигатель. Если ток или напряжение являются изменяющимися, инвертор создает только нужную частоту. Если напряжение неизменно, инвертор создает для электродвигателя как нужную частоту, так и нужное напряжение.
Даже если инверторы работают различным образом, их основная структура всегда одинакова. Основными элементами инверторов являются управляемые полупроводниковые приборы, включенные попарно в трех ветвях.
В настоящее время тиристоры в большинстве случаев заменены высокочастотными транзисторами, которые способны открываться и закрываться очень быстро. Частота коммутации обычно находится в пределах от 300 Гц до 20 кГц и зависит от используемых полупроводниковых приборов.
Полупроводниковые приборы в инверторе открываются и закрываются сигналами, формируемыми схемой управления. Сигналы могут формироваться несколькими различными способами.
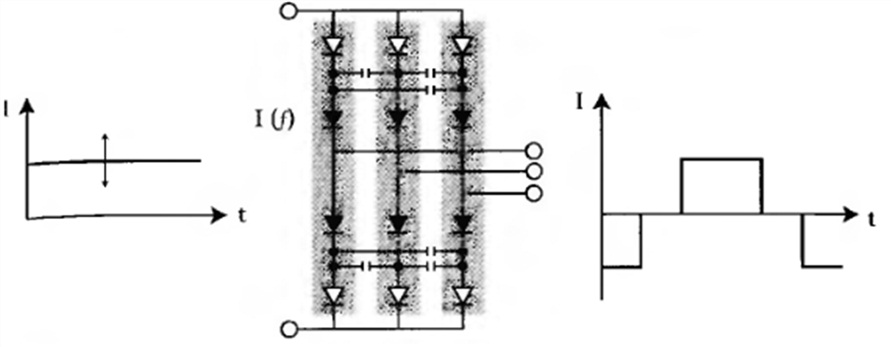
Рис. 14. Обычный инвертор тока промежуточной цепи изменяющегося напряжения.
Обычные инверторы, коммутирующие, главным образом, ток промежуточной цепи изменяющегося напряжения, содержат шесть тиристоров и шесть конденсаторов.
Конденсаторы позволяют тиристорам открываться и закрываться таким образом, что ток в фазных обмотках сдвигается на 120 градусов и должен быть адаптирован к типоразмеру электродвигателя. Когда на клеммы электродвигателя периодически подается ток в последовательности U-V, V-W, W-U, U-V..., возникает прерывистое вращающееся магнитное поле требуемой частоты. Даже если ток электродвигателя при этом имеет почти прямоугольную форму, напряжение электродвигателя будет практически синусоидальным. Однако при включении или выключении тока всегда возникают броски напряжения.
Конденсаторы отделяются от нагрузочного тока электродвигателя диодами.
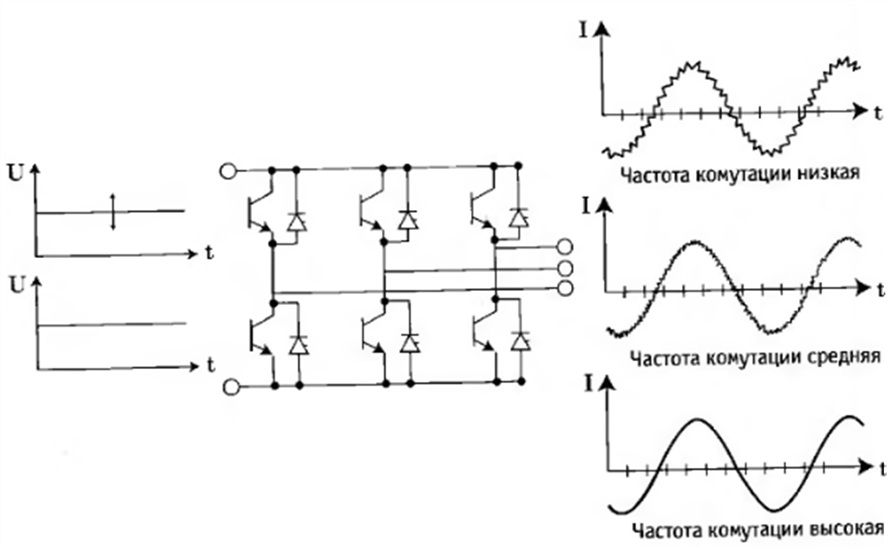
Рис. 15. Инвертор для изменяющегося или неизменного напряжения промежуточной цепи и зависимость выходного тока от частоты коммутации инвертора
Инверторы с изменяющимся или неизменным напряжением промежуточной цепи содержат шесть коммутационных элементов и вне зависимости от вида используемых полупроводниковых приборов работают почти одинаково. Схема управления открывает и закрывает полупроводниковые приборы с помощью нескольких различных способов модуляции, изменяя тем самым выходную частоту преобразователя частоты.
Первый способ предназначен для изменяющегося напряжения или тока в промежуточной цепи.
Интервалы, в течение которых отдельные полупроводниковые приборы открыты, расположены в последовательности, используемой для получения требуемой выходной частоты.
Эта последовательность коммутации полупроводниковых приборов управляется величиной изменяющегося напряжения или тока промежуточной цепи. Благодаря использованию генератора колебаний, управляемого напряжением, частота всегда отслеживает амплитуду напряжения. Такой вид управления инвертором называется амплитудно-импульсной модуляцией (АИМ).
Для фиксированного напряжения промежуточной цепи используется другой основной способ. Напряжение электродвигателя становится изменяющимся благодаря подаче напряжения промежуточной цепи на обмотки электродвигателя в течение более длинных или более коротких интервалов времени.
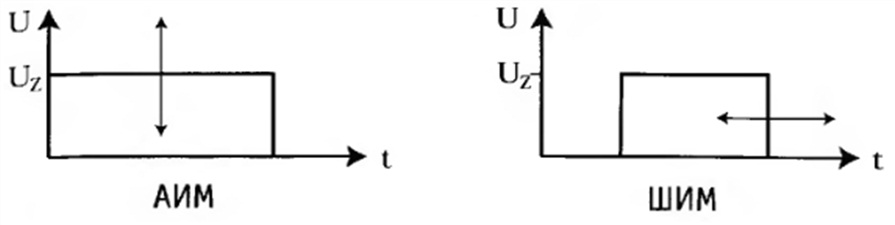
Рис. 16 Модуляция амплитуды и длительности импульсов
Частота изменяется путем изменения импульсов напряжения вдоль оси времени - положительно в течение одного полупериода и отрицательно - в течение другого.
Поскольку при этом способе происходит изменение длительности (ширины) импульсов напряжения, его называют широтно-импульсной модуляцией (ШИМ). ШИМ-модуляция (и связанные с ней способы, например синусоидально-управляемая ШИМ) является наиболее распространенным способом управления инвертора.
При ШИМ-модуляции схема управления определяет моменты коммутации полупроводниковых приборов при пересечении пилообразного напряжения и наложенного синусоидального опорного напряжения (синусоидально-управляемая ШИМ). Другими перспективными способами ШИМ-модуляции являются модифицированные методы широтно-импульсной модуляции, такие как WC и WCplus, разработанные корпорацией Danfoss.
Транзисторы
Поскольку транзисторы могут коммутироваться с высокими скоростями, электромагнитные помехи, возникающие при «импульсном» (намагничивании электродвигателя, уменьшаются.
Другим преимуществом высокой частоты коммутации является гибкость модуляции выходного напряжения преобразователя частоты, что позволяет вырабатывать синусоидальный ток электродвигателя, в то время как схема управления должна просто открывать и закрывать транзисторы инвертора.
Частота коммутации инвертора - это «палка о двух концах», поскольку высокие частоты могут привести к нагреву электродвигателя и появлению больших пиковых напряжений. Чем выше частота коммутации, тем выше потери.
С другой стороны, низкая частота коммутации может привести с сильному акустическому шуму.
Высокочастотные транзисторы можно разделить на три основные группы:
• Биполярные транзисторы (LTR)
• Униполярные полевые МОП-транзисторы (MOS-FET)
• Биполярные транзисторы с изолированным затвором (IGBT)
В настоящее время наиболее широко используются транзисторы IGBT, поскольку в них управляющие свойства транзисторов MOS-FET сочетаются с выходными свойствами транзисторов LTR; кроме того, они имеют надлежащий диапазон мощностей, подходящую проводимость и частоту коммутации, что позволяет значительно упростить управление современными преобразователями частоты.
В случае транзисторов IGBT как элементы инвертора, так и средства управления инвертором помещаются в опрессованный модуль, называемый "интеллектуальным силовым модулем" (IPM).
Амплитудно-импульсная модуляция (АИМ)
Амплитудно-импульсная модуляция используется для преобразователей частоты с изменяющимся напряжением промежуточной цепи.
В преобразователях частоты с неуправляемыми выпрямителями амплитуда выходного напряжения формируется прерывателем промежуточной цепи, а если выпрямитель является управляемым, амплитуда получается непосредственно.
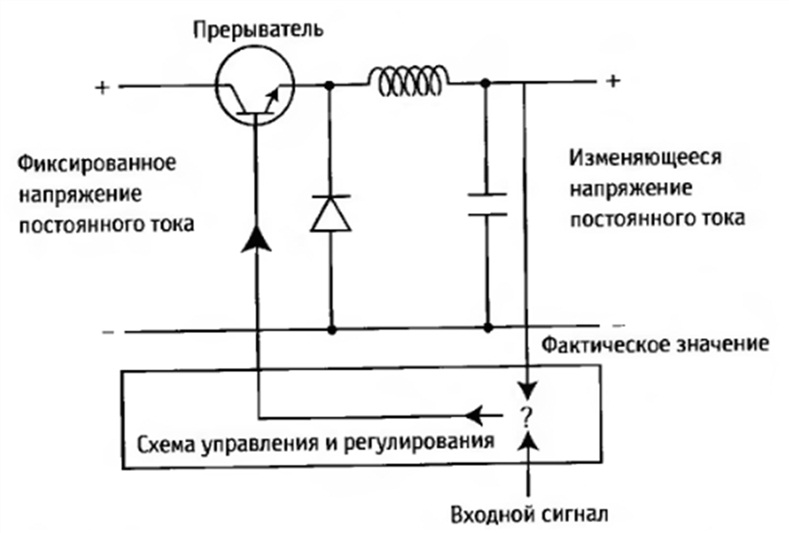
Рис. 20. Формирование напряжения в преобразователях частоты с прерывателем в промежуточной цепи
Транзистор (прерыватель) на рис. 20 отпирается или запирается схемой управления и регулирования. Значения времени коммутации зависит от номинального значения (входного сигнала) и измеренного сигнала напряжения (фактического значения). Фактическое значение измеряется на конденсаторе.
Катушка индуктивности и конденсатор действуют как фильтр, который сглаживает пульсации напряжения. Пик напряжения зависит от времени открывания транзистора, и если номинальное и фактическое значения различаются между собой, прерыватель работает до тех пор, пока не будет достигнут требуемый уровень напряжения.
Регулирование частоты
Частота выходного напряжения изменяется инвертором в течение периода, при этом полупроводниковые коммутационные устройства срабатывают в течение периода много раз.
Длительность периода можно регулировать двумя способами:
1.непосредственно входным сигналом или
2.с помощью изменяющегося постоянного напряжения , которое пропорционально входному сигналу.
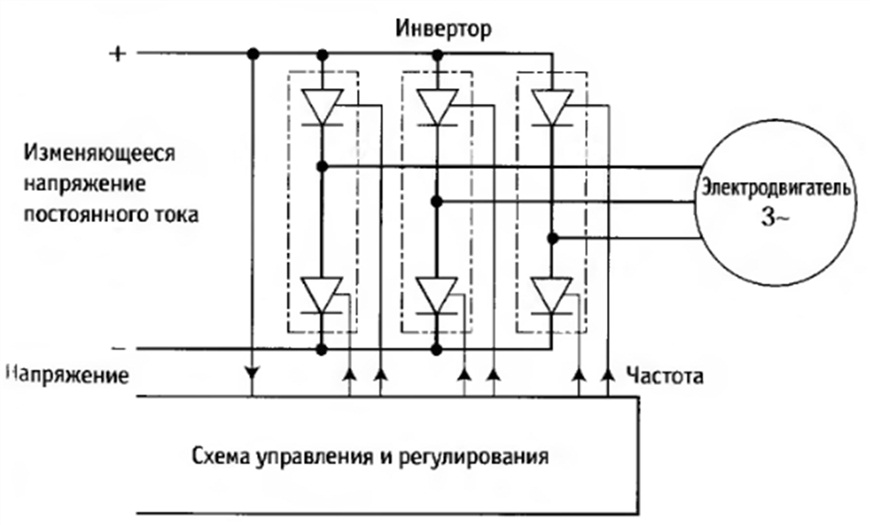
Рис. 21а. Регулирование частоты с помощью напряжения промежуточной цепи
Широтно-импульсная модуляция (ШИМ)
Широтно-импульсная модуляция является наиболее распространенным способом формирования трехфазного напряжения с соответствующей частотой.
При широтно-импульсной модуляции формирование полного напряжения промежуточной цепи (≈ √2 х Umains) определяется длительностью и частотой коммутации силовых элементов. Частота повторения ШИМ-импульсов между моментами включения и выключения является переменной и позволяет осуществлять регулировку напряжения.
Имеются три основных варианта задания режимов коммутации в инверторе с управлением посредством широтно-импульсной модуляции.
1.Синусоидально-управляемая ШИМ
2.Синхронная ШИМ
3.Асинхронная ШИМ
Каждая ветвь трехфазного ШИМ-инвертора может иметь два различных состояния (включено и выключено).
Три переключателя образуют восемь возможных коммутационных комбинаций (23), и, следовательно, восемь цифровых векторов напряжения на выходе инвертора или на обмотке статора подключенного электродвигателя. Как показано на рис. 21b, эти векторы 100, 110, 010, 011, 001, 101 находятся в углах описанного шестиугольника, используя в качестве нулевых векторы 000 и 111.
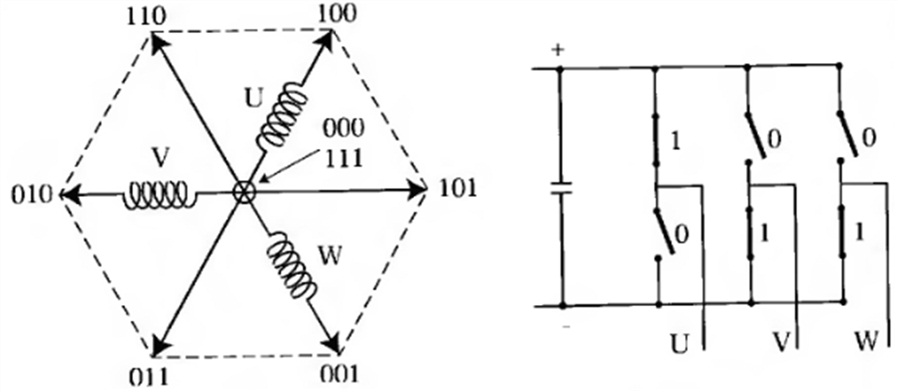
Рис. 21b
Рис. 21с
В случае коммутационных комбинаций 000 и 111 создается один и тот же потенциал на всех трех выходных клеммах инвертора - либо положительный, либо отрицательный относительно промежуточной цепи (см. рис. 21с). Для электродвигателя это означает эффект, близкий к короткому замыканию клемм; к обмоткам электродвигателя также приложено напряжение О В.
Синусоидально-управляемая ШИМ
При синусоидально-управляемой ШИМ для управления каждым инверторным выходом используется синусоидальное опорное напряжение (Us) Длительность периода синусоидального напряжения соответствует требуемой основной частоте выходного напряжения. На три опорных напряжения накладывается пилообразное напряжение (UD) см. рис. 22.
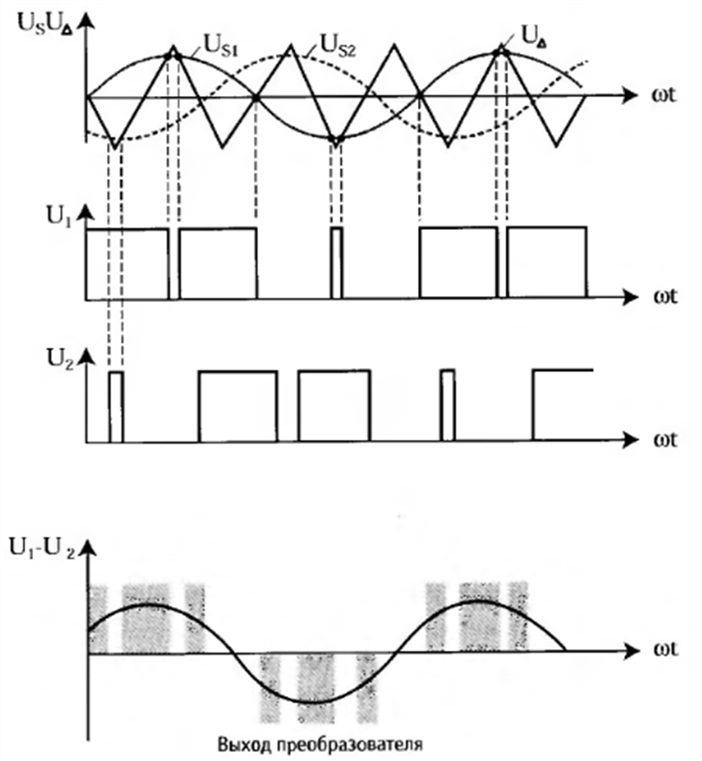
Рис. 22. Принцип действия синусоидально-управляемой ШИМ (с двумя опорными напряжениями)
При пересечении пилообразного напряжения и синусоидальных опорных напряжений полупроводниковые приборы инверторов либо открываются, либо закрываются.
Пересечения определяются электронными элементами платы управления. Если пилообразное напряжения больше синусоидального, то при уменьшении пилообразного напряжения выходные импульсы изменяются от положительного значения до отрицательного (или от отрицательного до положительного), так что выходное напряжение преобразователя частоты определяется напряжением промежуточной цепи.
Выходное напряжение изменяется с помощью отношения между длительностью открытого и закрытого состояния, причем для получения требуемого напряжения это отношение можно менять. Таким образом, амплитуда отрицательных и положительных импульсов напряжения всегда соответствует половине напряжения промежуточной цепи.
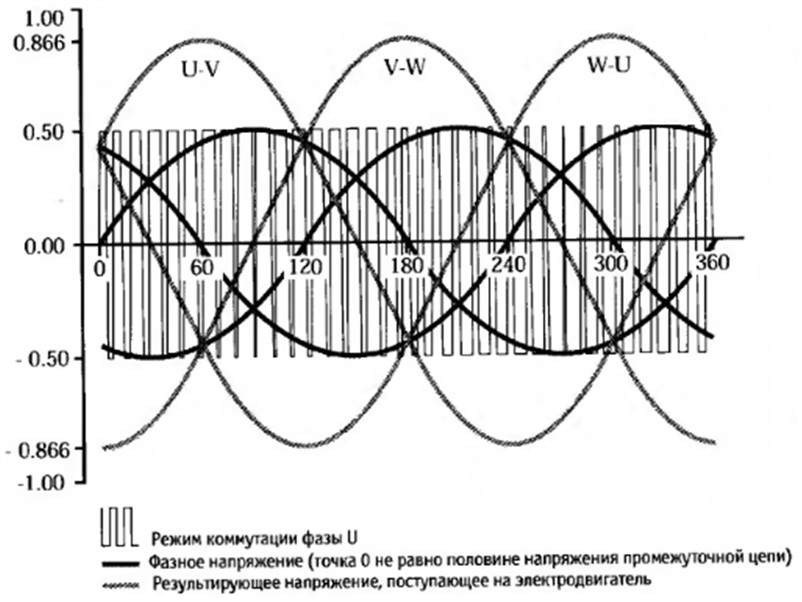
Рис. 23. Выходное напряжение синусоидально-управляемой ШИМ
При низких частотах статора время в закрытом состоянии увеличивается и может оказаться настолько большим, что окажется невозможным поддерживать частоту пилообразного напряжения.
Это увеличивает период отсутствия напряжения, и электродвигатель будет работать неравномерно. Чтобы избежать этого, на низких частотах можно удвоить частоту пилообразного напряжения.
Фазное напряжение на выходных клеммах преобразователя частоты соответствует половине напряжения промежуточной цепи, деленной на √ 2, т.е. равно половине напряжения питающей сети. Линейное напряжение на выходных клеммах в √ 3 раз больше фазного напряжения, т.е. равно напряжению питающей сети, умноженному на 0,866.
Инверторе ШИМ-управлением, который работает исключительно с модуляцией опорным синусоидальным напряжением, может подавать напряжение, равное 86,6 % номинального напряжения (см. рис. 23).
При использовании чисто синусоидальной модуляции выходное напряжение преобразователя частоты не может достигнуть напряжения электродвигателя, поскольку выходное напряжение также будет меньше на 13 %.
Однако требуемое дополнительное напряжение можно получить путем уменьшения числа импульсов, когда частота превышает примерно 45 Гц, но этот способ имеет некоторые недостатки. В частности, он вызывает ступенчатое изменение напряжения, что приводит к неустойчивой работе электродвигателя. Если число импульсов уменьшается, возрастают высшие гармоники на выходе преобразователя частоты, что увеличивает потери в электродвигателе.
Иной способ решения данной проблемы связан с использованием других опорных напряжений вместо трех синусоидальных. Эти напряжения могут быть любой формы (например, трапецеидальной или ступенчатой).
Например, одно общее опорное напряжение использует третью гармонику синусоидального опорного напряжения. Получить такой режим коммутации полупроводниковых приборов инвертора, который увеличит выходное напряжение преобразователя частоты, можно путем увеличения амплитуды синусоидального опорного напряжения на 15,5% и добавления к нему третьей гармоники.
Синхронная ШИМ
Основная трудность использования метода синусоидально-управляемой ШИМ заключается в необходимости определения оптимальных значений времени коммутации и угла для напряжения в течение заданного периода. Эти значения времени коммутации должны устанавливаться таким образом, чтобы допускать только минимум высших гармоник. Такой режим коммутации сохраняется только в течение заданного (ограниченного) диапазона частот. Работа за пределами этого диапазона требует использования другого метода коммутации.
Применение синусоидально-управляемой ШИМ необходимо для оптимизации использования напряжения и минимизации спектра гармоник. Если частота повторения (т.е. частота пилообразного напряжения) становится очень высокой по сравнению с частотой опорного сигнала, эти два сигнала могут действовать асинхронно по отношению друг к другу. При отношениях частот около 10 и ниже будут появляться паразитные гармоники, в связи с чем потребуется синхронизация этих двух сигналов. Такую синхронизацию можно наблюдать в результате так называемого «переключения передачи», которое пригодно для трехфазных приводов переменного тока с низкими динамическими свойствами, где напряжение и частоту можно изменять медленно (обычное V/f-управление).
Асинхронная ШИМ
Необходимость ориентации на поле и обеспечения быстродействия системы в отношении крутящего момента и регулирования скорости трехфазных приводов переменного тока (включая сервоприводы) требует ступенчатого изменения амплитуды и угла напряжения инвертора. Использование режима коммутации «обычной» или синхронной» ШИМ не позволяет производить ступенчатое изменение амплитуды и угла напряжения инвертора.
Одним из способов выполнения этого требования является асинхронная ШИМ, при которой вместо синхронизации модуляции выходного напряжения с выходной частотой, как это обычно делается для уменьшения гармоник в электродвигателе, производится модуляция цикла векторного регулирования напряжения, что приводит к синхронной связи с выходной частотой.
Существуют два основных варианта асинхронной ШИМ:
• SFAVM (Stator Flow-oriented Asynchronous Vector Modulation = (синхронная векторная модуляция, ориентированная на магнитный поток статора)
• 60° AVM (Asynchronous Vector Modulation = асинхронная векторная модуляция).
SFAVM
SFAVM - пространственно-векторный способ модуляции, который позволяет случайным образом, но скачкообразно изменять напряжение, амплитуду и угол инвертора в течение времени коммутации. Этим достигаются повышенные динамические свойства.
Главной целью применения такой модуляции является оптимизация магнитного потока статора с помощью напряжения статора с одновременным уменьшением пульсаций крутящего момента, поскольку отклонение угла зависит от последовательности коммутации и может вызвать увеличение пульсаций момента. Поэтому последовательность коммутации должна вычисляться таким образом, чтобы с вести к минимуму отклонение угла вектора. Переключение между векторами напряжения основано на вычислении желательной траектории магнитного потока в статоре электродвигателя, которая, в свою очередь, определяет крутящий момент.
Недостатком прежних, обычных ШИМ-систем питания были отклонения амплитуды вектора магнитного потока статора и угла магнитного потока. Эти отклонения неблагоприятно влияли на вращающееся поле (крутящий момент) в воздушном зазоре электродвигателя и вызывали пульсацию крутящего момента. Влияние отклонения U амплитуды пренебрежимо мало и может быть дополнительно уменьшено путем увеличения частоты коммутации.
Формирование напряжения электродвигателя
Стабильная работа соответствует регулированию вектора напряжения машины Uwt таким образом, чтобы он описывал окружность (см. рис. 24).
Вектор напряжения характеризуется величиной напряжения электродвигателя и скорости вращения, что соответствует рабочей частоте в рассматриваемый момент времени. Напряжение электродвигателя формируется путем создания средних значений с помощью коротких импульсов из соседних векторов.
Способ SFAVM, разработанный корпорацией Danfoss, наряду с прочими обладает следующими свойствами:
• Вектор напряжения можно регулировать по амплитуде и фазе без отклонения от установленного задания.
• Последовательность коммутации всегда начинается с 000 или 111. Это позволяет вектору напряжения иметь три режима коммутации.
• Среднее значение вектора напряжения получается с помощью коротких импульсов соседних векторов, а также нулевых векторов 000 и 111.
Схема управления
Схема управления, или плата управления - четвертый главный элемент преобразователя частоты, который предназначен для решения четырех важных задач:
• Управление полупроводниковыми элементами преобразователя частоты.
• Обмен данными между преобразователями частоты и периферийными устройствами.
• Сбор данных и формирование сообщений о неисправностях.
• Выполнение функций защиты преобразователя частоты и электродвигателя.
Микропроцессоры увеличили быстродействие схемы управления, существенно расширили область применения приводов и уменьшили количество необходимых вычислений.
Микропроцессор встраивается в преобразователь частоты и всегда способен определять оптимальную импульсную комбинацию для каждого рабочего состояния.
Схема управления для АИМ-преобразователя частоты
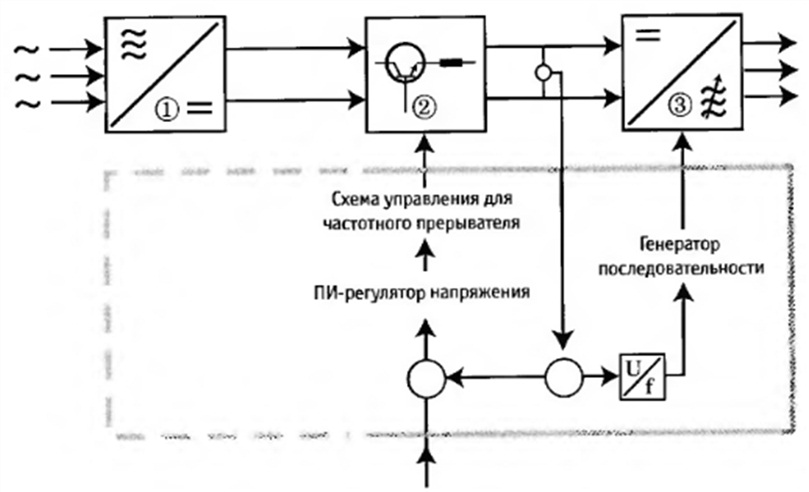
Рис. 25 Принцип действия схемы управления для промежуточной цепи, управляемой прерывателем.
На рис. 25 показан преобразователь частоты с АИМ-управлением и прерывателем промежуточной цепи. Схема управления управляет преобразователем (2) и инвертором (3).
Управление производится по мгновенному значению напряжения промежуточной цепи.
Напряжение промежуточной цепи управляет схемой, которая действует как счетчик адреса в памяти для хранения данных. Память хранит выходные последовательности для импульсной комбинации инвертора. Когда напряжение промежуточной цепи увеличивается, счет происходит быстрее, последовательность заканчивается скорее, а выходная частота возрастает.
Что касается управления прерывателем, то напряжение промежуточной цепи сначала сравнивается с номинальным значением опорного сигнала-сигнала напряжения. Ожидается, что этот сигнал напряжения дает правильные значения выходного напряжения и частоты. Если изменяют опорный сигнал и сигнал промежуточной цепи, ПИ-регулятор информирует схему о том, что необходимо изменить время цикла. Это вызывает подстройку напряжения промежуточной цепи по опорному сигналу.
Обычным методом модуляции для управления преобразователем 1астоты является амплитудно-импульсная модуляция (АИМ). Широтно-импульсная модуляция (ШИМ) является более современным методом.
Управление по полю (векторное управление)
Векторное управление может быть организовано несколькими способами. Основным различием способов являются критерии, которые используются при вычислении значений активного тока, тока намагничивания (магнитного потока) и крутящего момента.
При сравнении между собой двигателей постоянного тока и трехфазных асинхронных двигателей (рис. 26) выявляются определенные проблемы. На постоянном токе параметры, которые важны для создания крутящего момента, - магнитный поток (Ф) и ток якоря - фиксированы по отношению к размеру и расположению фазы и определяются ориентацией обмоток возбуждения и положением угольных щеток (рис. 26а).
В двигателе постоянного тока ток якоря и ток, создающий магнитный поток, расположены под прямым углом друг к другу и их значения не очень велики. В асинхронном электродвигателе положение магнитного потока (Ф) и тока ротора (I,) зависит от нагрузки. Кроме того, в противоположность двигателю постоянного тока, фазовые углы и ток не могут быть непосредственно определены по размеру статора.
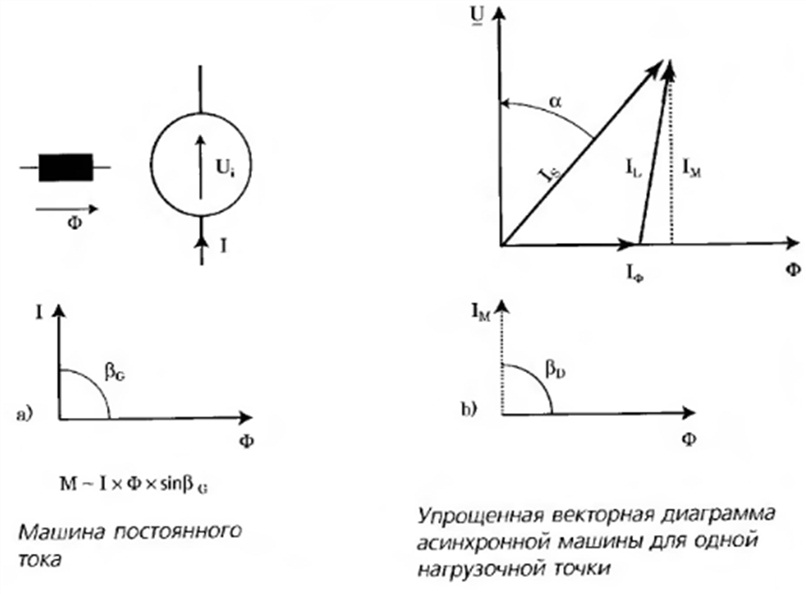
Рис. 26. Сравнение машины постоянного тока и асинхронной машины переменного тока
Однако с помощью математической модели можно вычислить крутящий момент по зависимости между магнитным потоком и током статора.
Из измеренного тока статора (ls) выделяется составляющая (lw), которая создает крутящий момент с магнитным потоком (Ф) при прямых углах между двумя этими переменными (lв). Тем самым создается магнитный поток электродвигателя (рис. 27).
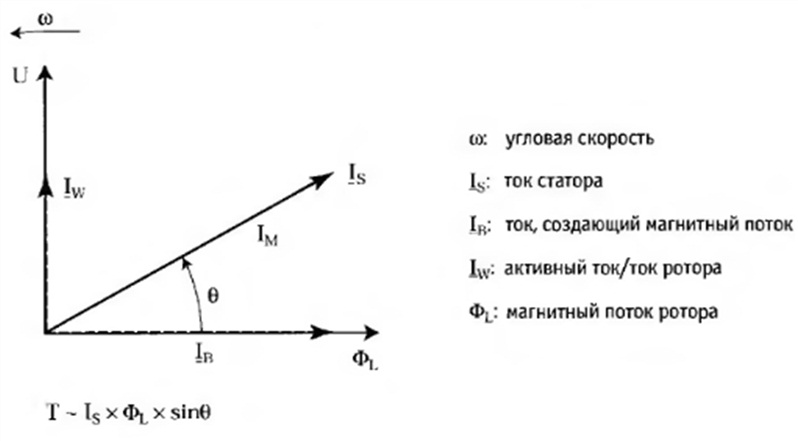
Рис. 27. Расчет составляющих тока для регулирования по полю
С помощью этих двух составляющих тока можно независимо влиять на крутящий момент и магнитный поток. Однако ввиду определенной сложности вычислений на основе динамической модели электродвигателя, такие вычисления рентабельны только в цифровых приводах.
Поскольку по такому методу регулирование возбуждения, которое не зависит от нагрузки, отделено от регулирования крутящего момента, то можно динамически управлять асинхронным двигателем так же, как и двигателем постоянного тока - при условии, что имеется сигнал обратной связи. Этот способ управления трехфазным двигателем переменного тока обладает следующими преимуществами:
• хорошая реакция на изменения нагрузки
• точное регулирование мощности
• полный крутящий момент при нулевой скорости
• рабочие характеристики сравнимы с характеристиками приводов постоянного тока.
Регулирование V/f-характеристик и вектора магнитного потока
В последние годы разработаны системы регулирования скорости трехфазных двигателей переменного тока на основе двух разных принципов управления:
нормального V/f-регулирования, или СКАЛЯРНОГО управления, и регулирования вектора магнитного потока.
Оба метода имеют свои преимущества, зависящие от конкретных требований к рабочим характеристикам привода (динамике) и точности.
Регулирование V/f-характеристик имеет ограниченный диапазон регулирования скорости (приблизительно 1:20), и на малой скорости требуется другой принцип регулирования (компенсация). При использовании этого метода относительно просто адаптировать преобразователь частоты к электродвигателю, причем регулирование невосприимчиво к мгновенным изменениям нагрузки во всем диапазоне скоростей.
В приводах с регулированием магнитного потока преобразователь частоты должен точно конфигурироваться под электродвигатель, что требует детального знания его параметров. Также необходимы дополнительные компоненты для получения сигнала обратной связи.
Некоторые преимущества этого типа управления:
• быстрая реакция на изменения скорости и широкий диапазон скоростей
• лучшая динамическая реакция на изменения направления
• обеспечивается единый принцип управления во всем диапазоне скоростей.
Для пользователя оптимальным решением было бы сочетание наилучших свойств обоих принципов. Очевидно, что одновременно необходимы и такое свойство, как устойчивость к ступенчатой нагрузке/разгрузке во всем диапазоне скоростей, что обычно является сильной стороной V/f-регулирования, и быстрая реакция на изменения задания скорости (как при управлении по полю).
| Схемы управления электроприводами |
| Сервопривод. Сервоприводы с современными синхронными электродвигателями |
| Коротко о частотно-регулируемом приводе. Преобразователь частоты. |